SSI absolute encoders are widely used in industrial automation systems where stable position feedback and deterministic communication are required. Compared with fieldbus-based solutions, SSI provides a direct and predictable data transmission method, making it suitable for applications where system simplicity and signal stability are prioritized.
In practical engineering applications, SSI encoder configuration is not limited to selecting resolution or output format. Instead, it is a process of aligning mechanical structure, signal definition, and controller compatibility with the actual system requirements. In many cases, incorrect configuration does not cause immediate failure, but leads to unstable feedback, incorrect position interpretation, or integration difficulties during operation.
One of the primary configuration parameters is the resolution structure. This includes both single-turn resolution and, if required, multi-turn counting range. The total bit length must match the controller input format exactly. Even when communication is stable, a mismatch between encoder output and controller interpretation can result in incorrect position values or inconsistent system behavior.
Signal format and electrical characteristics are also critical. SSI encoders typically use differential signal transmission, such as RS422 levels, to improve noise resistance. However, the actual effectiveness depends on wiring conditions, cable quality, and controller compatibility. In environments with high electrical interference, signal integrity often depends more on installation quality than on interface specification.
Clock signal compatibility is another key factor. SSI communication relies on a clock generated by the controller, so the encoder must operate reliably within the expected clock frequency range. In systems with long transmission distances or complex wiring environments, improper clock settings may lead to unstable data transmission or timing errors.
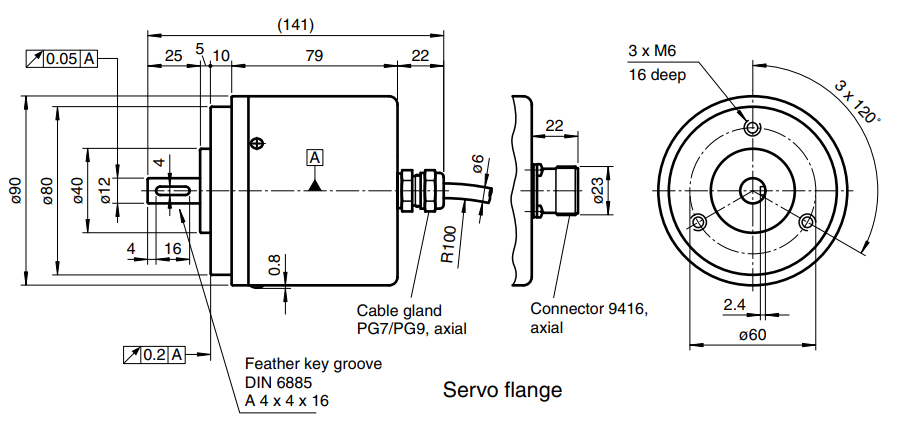
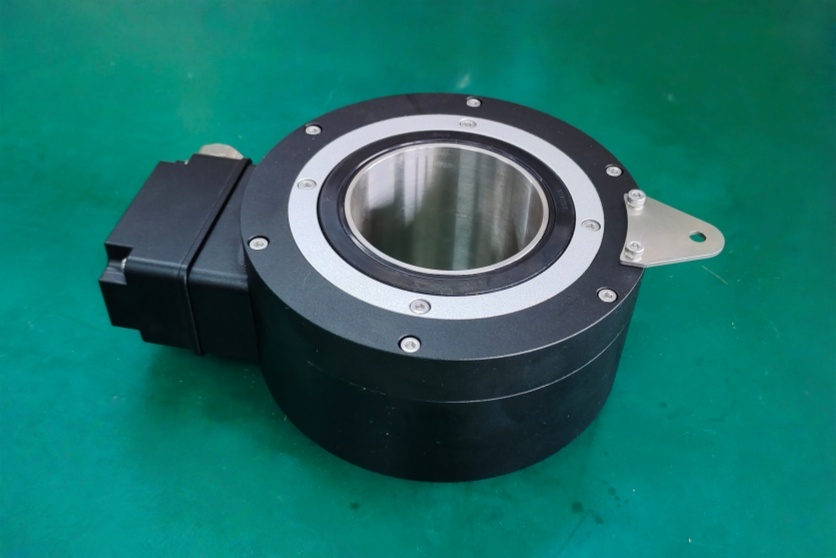
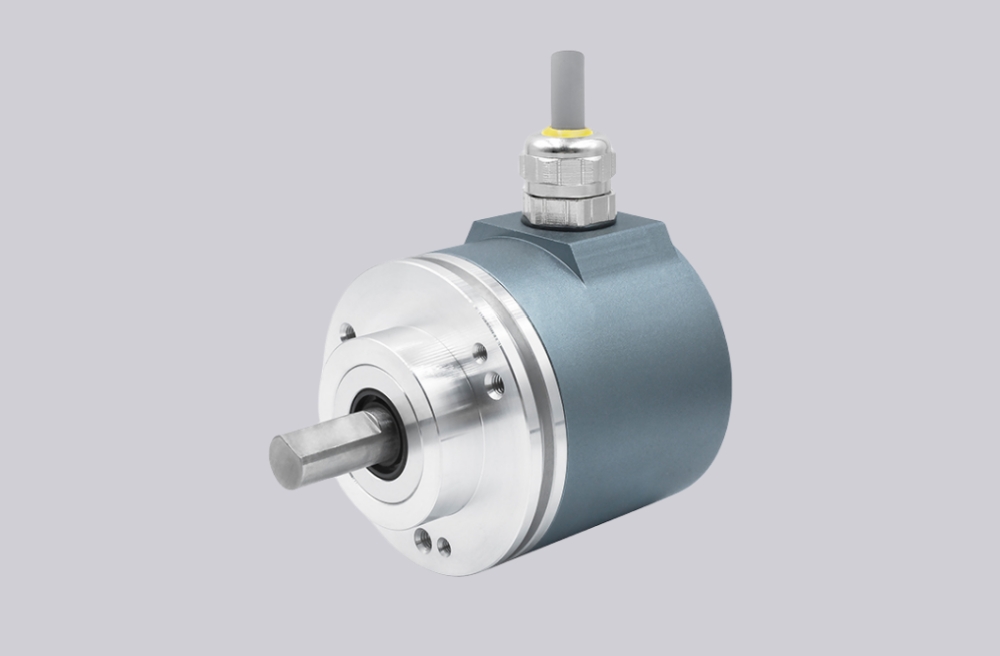
Mechanical configuration plays an equally important role. Shaft type, flange design, mounting structure, and installation space must all match the equipment. Even a well-configured signal interface cannot compensate for poor mechanical alignment or unsuitable installation conditions. In many industrial applications, long-term stability is determined more by mechanical matching than by nominal encoder specifications.
Environmental factors should also be considered during configuration. Temperature range, vibration level, dust exposure, and protection requirements all influence encoder performance. In harsh industrial environments, sealing, structural robustness, and resistance to vibration are often more critical than interface complexity.
From a system integration perspective, SSI encoder configuration should be treated as a coordinated process rather than a parameter selection task. The goal is to ensure that signal structure, electrical interface, mechanical installation, and environmental conditions all align with the control system.
In practical projects, a properly matched encoder configuration provides more reliable performance than a higher-specification device that does not fully fit the application. For this reason, configuration accuracy and system compatibility are the key factors that determine long-term stability.
This article outlines the main configuration parameters of SSI absolute encoders and explains how these parameters should be evaluated in real industrial integration scenarios.