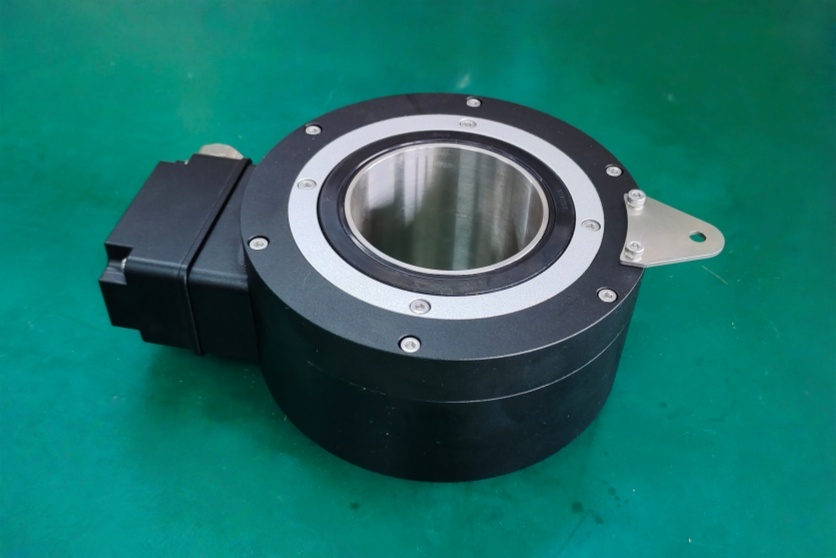
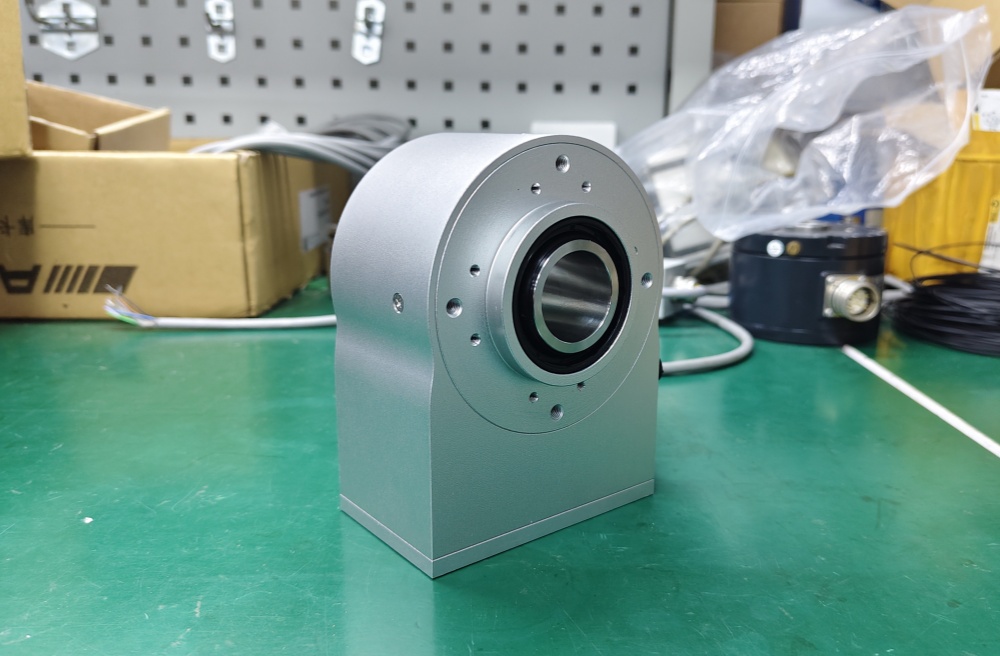
PROFINET-based hollow shaft absolute encoders are widely used in industrial automation systems where real-time communication and direct integration with PLC-controlled networks are required. By combining an Industrial Ethernet interface with a hollow shaft structure, this type of encoder is typically selected when both communication compatibility and installation efficiency must be achieved simultaneously.
In practical applications, encoder selection is not determined by protocol alone. The key requirement is alignment between network configuration, mechanical installation, and system logic. In many cases, integration issues are not caused by encoder performance, but by mismatches between device configuration, controller expectations, and installation conditions.
From a communication perspective, PROFINET enables structured data exchange, diagnostics, and network-based configuration. Unlike point-to-point interfaces, it requires correct setup within the control system. Device naming, IP assignment, and GSDML parameter matching must be consistent. An encoder may be powered and connected, yet remain unavailable to the system if these parameters are not correctly configured.
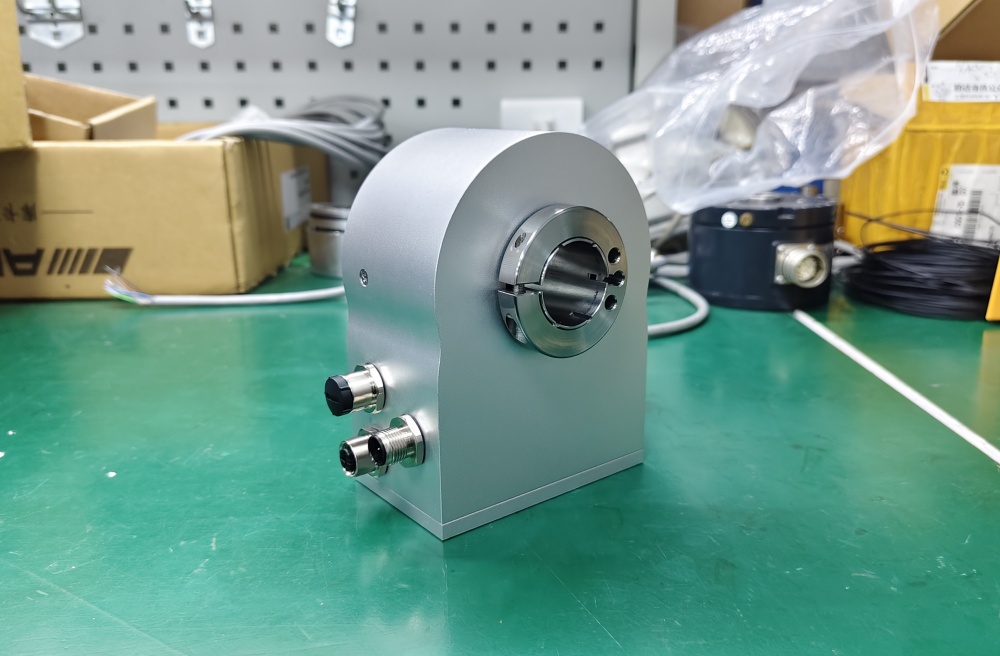
Mechanical installation plays an equally critical role. For hollow shaft encoders, shaft diameter, clamping method, and installation alignment must match the machine precisely. Even minor deviations can introduce vibration, unstable feedback, or long-term wear. In industrial environments, mechanical mismatch is a common source of reliability issues, even when communication is functioning normally.
Torque support is another essential requirement. The encoder housing must be fixed using an anti-rotation mechanism such as a torque arm or locating pin. Without proper support, reaction torque can affect the housing, leading to signal instability or mechanical failure over time.
Cable routing and network stability also influence system performance. As an Ethernet-based interface, PROFINET communication depends on cable quality, connector integrity, shielding, and routing conditions. In environments with motors and inverters, improper cable routing can introduce interference that affects data transmission reliability.
Parameter configuration is a further integration layer. PROFINET encoders typically allow adjustment of scaling, preset position, and counting direction. These parameters must be consistent with the controller logic. Incorrect configuration may not interrupt communication, but can result in incorrect position values and unpredictable system behavior.
During commissioning, both network-level and mechanical-level verification are required. The encoder must be correctly recognized within the network while also being properly installed and aligned. In many cases, system issues arise because only one of these aspects is verified.
From an engineering perspective, successful integration depends on coordinating communication setup, mechanical installation, and parameter configuration. The objective is not to select the most advanced encoder, but to ensure full compatibility with the control system and operating environment.
In practical systems, stable communication does not guarantee correct operation. Data may be transmitted reliably while still being interpreted incorrectly by the controller. For this reason, both communication integrity and data consistency must be validated during commissioning.
This article outlines the key considerations for selecting and integrating PROFINET hollow shaft absolute encoders and highlights the factors that determine stable long-term operation in industrial environments.