A custom compatible replacement for FGHJ2AK-1024G-90G-NG/16K can be supplied by EncoderWorks, with the main replacement decision focused on 16K hollow-shaft fit, torque bracket freedom, and HTL direction recognition. This model is not difficult because of its 1024 PPR signal. It becomes risky when the encoder is mounted correctly by appearance, but the torque bracket, shield grounding, or A/B phase order changes the behavior seen by the drive.
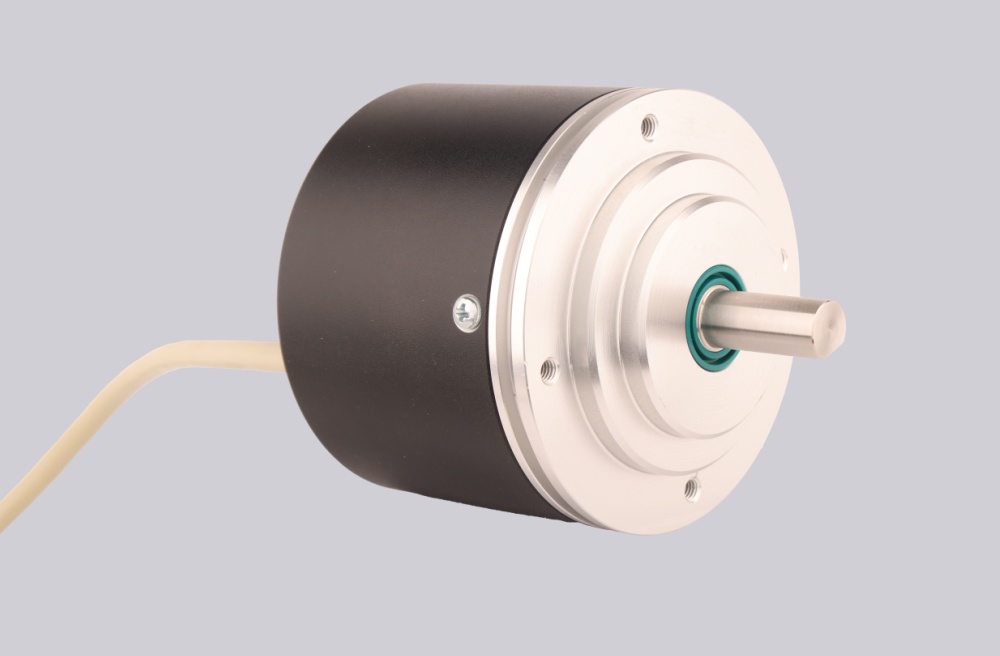
The FGHJ2AK-1024G-90G-NG/16K is an incremental hollow-shaft encoder with 1024 pulses per revolution, G inverted signals, 90° quadrature, NG reference pulse with inverted signal, AK terminal-strip connection, and a 16K cylindrical hollow-shaft bore. The FG 2 / FGHJ 2 series is intended for standard drives in heavy industry, and the catalog defines FGHJ 2 as the hollow-shaft design with insulated bearings for long service life and shielding against shaft currents. Its electrical platform includes 12–30 VDC supply, HTL pulse height approximately equal to supply voltage, and a 200 kHz maximum frequency.


The first failure boundary is the 16K shaft interface. A cylindrical bore is easier to service than a conical bore, but it still requires a clean shaft, correct seating length, and no forced alignment. If the encoder is pushed onto a worn or slightly damaged shaft, the hollow-shaft bearing system may carry stress before the drive starts. The torque bracket must only stop housing rotation; it must not pull the encoder body into position.
This replacement fails when the 16K bore fits mechanically but the torque bracket is preloaded, causing the housing to fight shaft movement during acceleration, braking, or thermal expansion. The symptom may not be immediate signal loss. More often, the drive sees intermittent direction errors, unstable speed feedback, or bearing noise after running under load.
The second checkpoint is HTL direction recognition. At 1024 PPR, frequency margin is normally comfortable, but direction still depends on the correct relationship between the 0° and 90° channels. If A/B order is reversed, delayed by poor wiring, or weakened by shield noise, the controller may count pulses while interpreting rotation incorrectly. Direction should be verified at low speed before closed-loop operation or machine restart.
The NG reference pulse must also be mapped deliberately. NG and inverted NG are not spare outputs; they are used for reference search, counter reset, or position validation. A machine can run in speed mode with a wrong NG connection, then fail during homing or restart. For this reason, NG should be checked together with A/B phase order at the receiving device, not only at the encoder terminal strip.
The AK terminal strip makes field replacement convenient, but it also exposes wiring mistakes. Signal names must be confirmed directly: 0°, inverted 0°, 90°, inverted 90°, NG, inverted NG, supply, 0 V, and shield. Old cable color is not a reliable guide, especially after previous maintenance or cabinet modifications. Shield bonding and grounding should be kept short, clean, and separated from inverter output wiring.
The replacement decision should first confirm 16K shaft fit, torque bracket freedom, insulated-bearing behavior, A/B direction sequence, NG assignment, and HTL counter margin. EncoderWorks treats FGHJ2AK-1024G-90G-NG/16K as an industrial encoder custom compatible solution where the safest result comes from preserving the mechanical freedom and the original signal logic together.
Typical production lead time: 15 working days.
Key Data
| Item | Data |
|---|---|
| Model | FGHJ2AK-1024G-90G-NG/16K |
| Encoder type | Incremental hollow-shaft encoder |
| Series | FGHJ 2 |
| Bearing execution | Insulated hollow-shaft bearing design |
| Pulse rate | 1024 PPR |
| Signal format | G output with 90° quadrature |
| Reference pulse | NG, with inverted signal |
| Output type | HTL, approx. as supply voltage |
| Supply voltage | 12–30 VDC |
| Max frequency | 200 kHz |
| Connection | AK terminal strip |
| Hollow shaft | 16K cylindrical bore |
| Main engineering anchor | Torque bracket freedom and HTL direction |
| Main failure boundary | Bracket preload, A/B direction error, wrong NG assignment |