We developed a custom solution for the AMG11P29Z0 encoder, intended for hazardous-area rotary feedback systems where multiturn absolute position tracking must be transmitted through a stable Profibus interface. This configuration combines 13-bit singleturn and 16-bit multiturn encoding in a solid shaft Ø11 mm structure with EURO flange B10, making it suitable for systems that require continuous absolute position data, bus-level parameter handling, and position retention across power cycles. It is not a high-speed margin design. It is a bus-controlled configuration where communication stability and network-side integration determine whether the system remains usable. Typical production lead time: 15 working days.
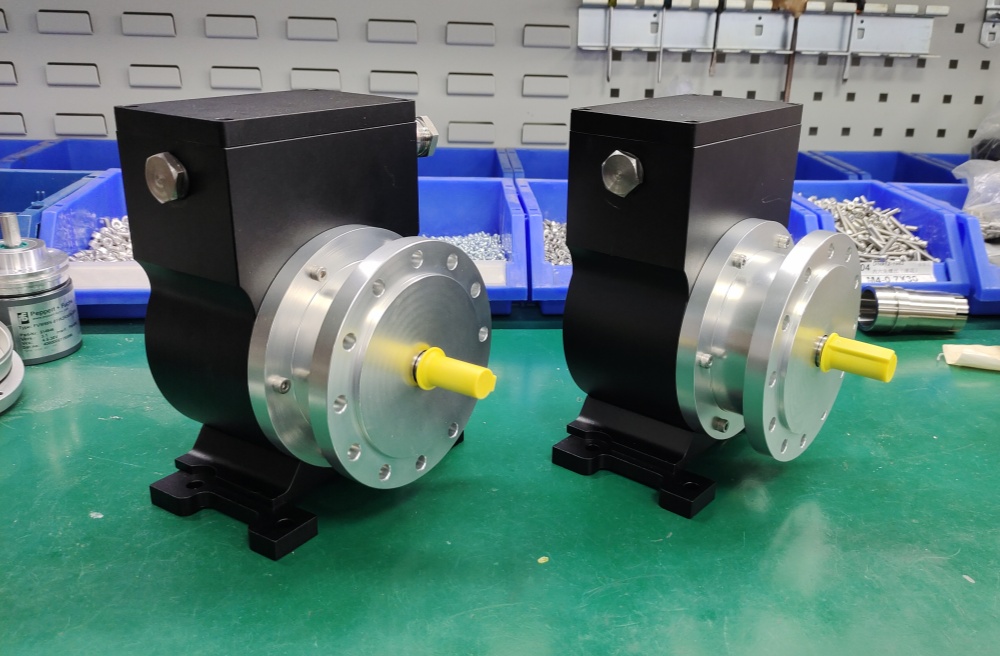
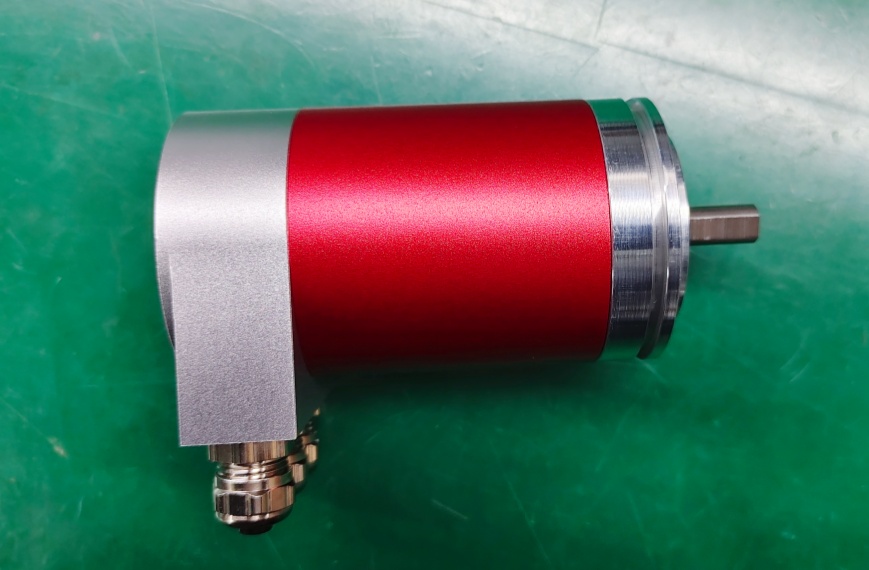
Custom Solution Photos
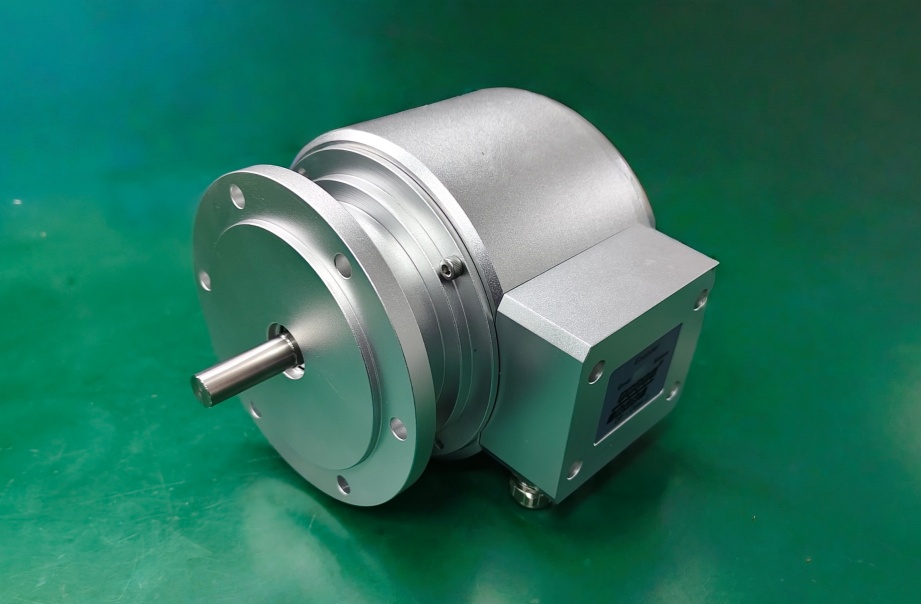

Signal usability at this interface level depends directly on the structure, cable routing, and installation quality shown here.
System Limits
This configuration is limited by Profibus communication integrity and system-side bus handling, not by mechanical capability.
The encoder provides multiturn absolute data over Profibus-DP V0, with position value as input data and preset handling on the output side. The mechanical platform is strong, but that is not where this version fails first. It fails when bus communication becomes unstable, when address and parameter handling are incorrect, or when the network cannot keep position data exchange consistent under real cabinet conditions. The encoder supports scaling, rotating direction setting, and preset functions, which means system usability depends as much on correct bus integration as on encoder hardware.
Priority of limits:
- Bus communication stability becomes critical before mechanical limits are reached
- Parameter handling and network quality determine whether multiturn position data remains usable
This configuration is limited entirely by communication quality and controller-side integration capability, not by encoder structure.
Installation and Wiring Constraints
Electrical installation and bus-side configuration determine whether this encoder can remain usable.
- Profibus requires stable differential data transmission and correct bus wiring
- Poor shielding and grounding reduce communication stability
- Incorrect address setting or parameter configuration causes startup failure
- Parallel routing with motor power cables increases the risk of communication errors
Field boundary:
- Weak shielding or poor bus wiring → controller cannot interpret position data reliably
- Noisy cabinet environment → communication becomes unstable before mechanical limits are reached
- Incorrect preset, scaling, or direction settings → position value becomes unusable at the system level
The mechanical platform is robust, with IP67 protection, Ø11 mm solid shaft, and admitted shaft load up to 250 N axial / 350 N radial, but failures occur on the communication side first.
Replacement and Interface Mapping
- Only valid when the system supports Profibus absolute multiturn input
- Suitable for applications requiring continuous absolute position tracking with bus-level parameter handling
- Not applicable when communication quality, address control, or parameter management cannot be maintained
- Connection form and interface details can be adjusted within the custom solution scope
Delivery and Customization Scope
This solution can be customized in connection type, interface details, and mechanical mounting according to the target control system. Typical production lead time: 15 working days.
Key Data
- Model: AMG11P29Z0
- Type: Absolute encoder
- Interface: Profibus-DP V0
- Absolute resolution: 13-bit singleturn + 16-bit multiturn
- Supply voltage: 9…30 VDC
- Transmission rate: 9.6…12000 kBaud
- Mechanical speed limit: 3500 rpm
- Protection rating: IP67
- Shaft load: 250 N axial / 350 N radial
- Structure: Ø11 mm solid shaft, EURO flange B10