We have developed a custom solution for model 8.5862.1223.2004, based on a compact multiturn absolute encoder platform with SSI communication, a 58 mm clamping flange, and a Ø10 × 20 mm solid shaft with flat. This configuration is intended for space-limited installations that still require stable absolute position feedback across multiple revolutions. The platform is factory-set as 8192 × 4096 (25 bit), Gray, and supports parameter-level adjustment for direction, preset, and scaling to match system requirements. Typical production lead time: 15 working days.
Technical Key Parameters
- Interface: SSI
- Resolution: 25 bit (13 bit singleturn + 12 bit multiturn)
- Flange: Ø58 mm clamping flange
- Shaft: Ø10 × 20 mm solid shaft with flat
- Supply voltage: 5...30 VDC
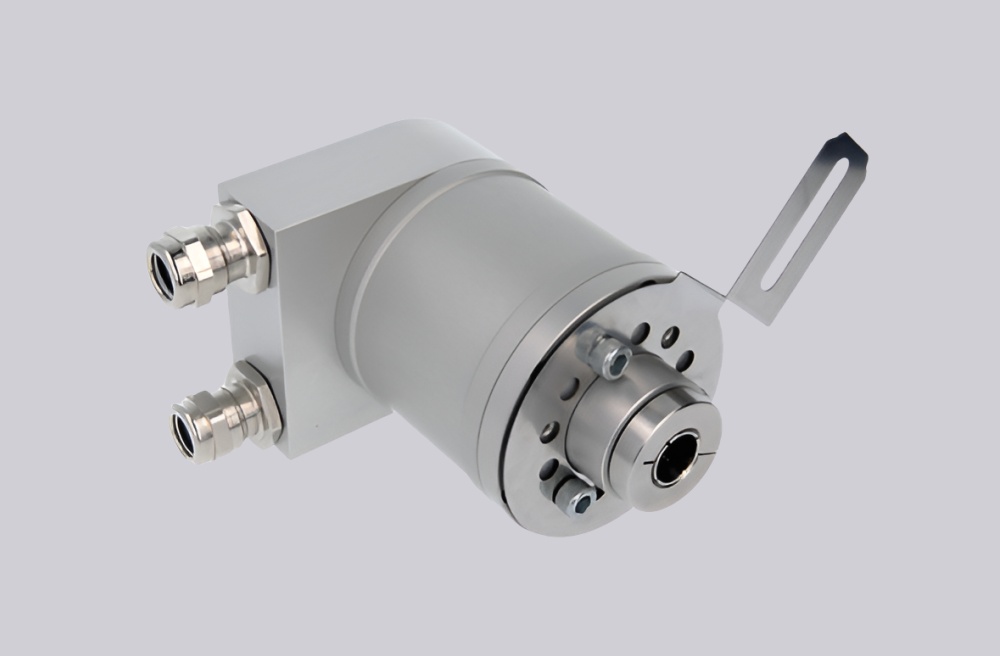
Custom Solution Photos


The structure reflects the shaft configuration, flange mounting layout, and radial M23 connector orientation used in this solution.
Wiring and Installation Notes
This model uses an SSI interface with RS485 output driver, so signal reliability depends mainly on wiring quality. In practice, unstable position data is more often caused by shielding interruption or poor cable routing than by encoder failure. The clock and data pairs should be routed separately from inverter output and motor power cables, with shielding kept continuous along the full cable path.
The encoder supports 100 kHz / 500 kHz SSI clock rates, but higher speed is not always better. In longer cable runs or noisy cabinets, lowering the clock rate usually improves stability more effectively than adding extra filtering. The SET and direction (V/R) inputs should also be tied to a defined logic level when unused, because floating control lines can cause unstable counting direction or unexpected position shifts during commissioning.
Mechanically, accurate shaft alignment is critical. This is a compact shaft-type encoder with moderate shaft-load capacity, so coupling selection should absorb installation tolerance rather than transfer radial or axial stress into the bearings. In compact assemblies, shaft misalignment is usually a more common issue than electrical mismatch.
Application and Integration Notes
This configuration is typically used in compact automation systems, positioning units, indexing assemblies, and retrofit motion modules where multiturn absolute feedback is required within limited installation space. Its practical value lies in providing stable absolute position tracking without introducing the additional protocol-side complexity of a fieldbus encoder.
Compared with fieldbus solutions, SSI simplifies control-side integration but requires more attention to wiring quality and signal timing. In practice, this type of encoder is selected when a fieldbus structure would add unnecessary configuration complexity, while SSI already provides sufficient stability and easier integration at the control level. The programmable platform also helps in retrofit work where the mechanical interface remains fixed but the signal behavior still needs adjustment.
Custom Encoder Solution
- Compact 58 mm shaft-type structure for installations with limited mounting space
- 25-bit SSI multiturn feedback for absolute position tracking across multiple revolutions
- Ø10 × 20 mm shaft with flat for standard compact coupling arrangements
- Programmable platform for direction, preset, and scaling-related system matching
Lead Time and Custom Development
This model is configured based on confirmed mechanical structure and SSI communication requirements. Typical production lead time: 15 working days.
Key Technical Data
| Item | Specification |
|---|---|
| Interface | SSI |
| Resolution | 25 bit (13 + 12) |
| Supply voltage | 5...30 VDC |
| Mounting | Ø58 mm clamping flange |
| Shaft | Ø10 × 20 mm solid shaft |
| Connection | M23 radial connector |
| Max speed | 6000 rpm |
| Protection | IP65 |
Technical Summary
The engineering value of 8.5862.1223.2004 lies in its compact 58 mm shaft-mounted design combined with stable 25-bit SSI multiturn feedback on a simple electrical interface. It is best suited for space-constrained installations that still require reliable absolute position tracking across multiple revolutions. In practical applications, this type of encoder is selected when a fieldbus solution introduces unnecessary complexity, while SSI provides sufficient stability and simpler system integration.