We developed a custom solution for model OCD-PPA1B-1210-C10S-PRT. Selected when multi-turn absolute feedback is required via parallel push-pull output, using a 58 mm clamping flange and 10 mm solid shaft, without changing an existing parallel-control architecture. Typical production lead time: 15 working days. The referenced configuration is a multi-turn absolute version with optical sensing, 10-bit single-turn resolution, 12-bit multi-turn resolution, binary code, and a mechanical gear-based multi-turn system without battery.
Key Specifications
- Interface: parallel push-pull
- Resolution: 10-bit single-turn + 12-bit multi-turn
- Code: binary
- Multi-turn: mechanical gear train, no battery
- Supply: 10–30 VDC
- Protection: IP66/IP67 shaft side, IP65 housing
- Structure: 58 mm clamping flange, 10 mm solid shaft, 20 mm shaft length
- Connection: radial M23 male, 26-pin
- Speed: up to 3000 rpm
Decision Snapshot
- Best for: parallel absolute retrofit systems needing multi-turn position retention
- Key fit: 10 mm solid shaft, 58 mm clamping flange, M23 26-pin radial connection
- Avoid if: the system is already built around fieldbus communication or only needs incremental feedback; that is an engineering fit judgment based on the listed parallel interface and direct bit output structure.
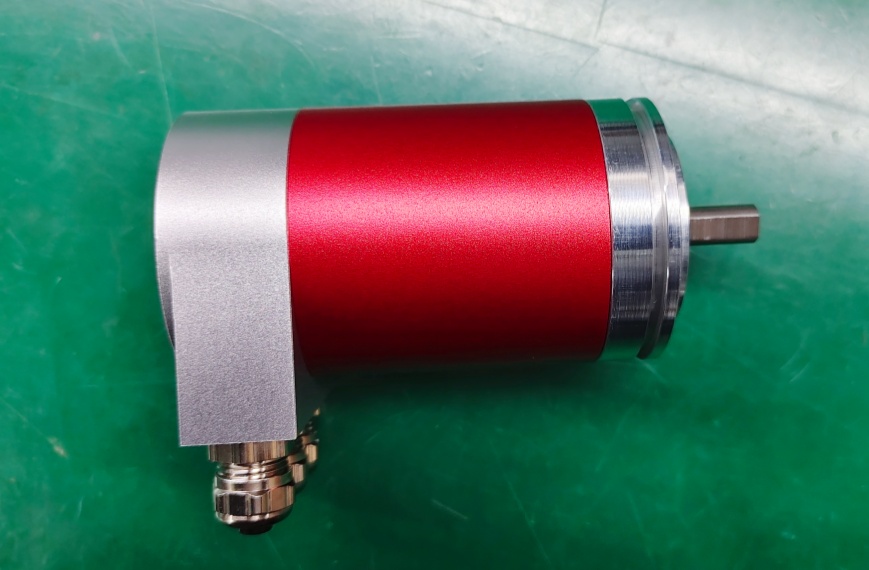
Custom Solution Photos


Encoder structure reference: 58 mm clamping flange, 10 mm solid shaft, radial M23 26-pin connector.
Signal & Output Logic
- Bit 1–22 parallel output
- Includes Latch and DIR control
- Direction configurable via cable or connector setting
Primary integration reason: the controller reads direct multi-turn absolute bit data rather than bus telegrams. Primary limitation: this architecture is efficient for parallel retrofit, but it is not suitable for Profibus, CANopen, EtherCAT, or incremental-only systems. That conclusion follows from the published 22-bit output map and push-pull interface.
Wiring & Installation
- Connection: radial M23 male, 26-pin
- Signals: Bit 1–22, Latch, DIR, Power Supply, GND
Primary commissioning risk: incorrect controller-side bit mapping on higher-count parallel systems. Primary mechanical constraint: coupling quality. The published bearing-life values change strongly with axial and radial load, so shaft alignment should be treated as a first-step condition rather than a final correction.
Integration & Compatibility
- Designed for parallel absolute encoder systems
- Matches 58 mm clamping flange installations with 10 mm solid shaft
- Suitable for multi-turn position feedback without battery replacement
- Not suitable for bus-based control structures or simple incremental feedback use cases; this is a selection conclusion based on the listed interface and output type.
Lead Time
Typical production lead time: 15 working days. Custom adaptation can be developed around shaft fit, connector layout, signal assignment, and installation requirements.
Key Technical Data
| Item | Data |
|---|---|
| Model | OCD-PPA1B-1210-C10S-PRT |
| Interface | Parallel push-pull |
| Type | Absolute multi-turn |
| Sensing | Optical |
| Resolution | 10 bit + 12 bit |
| Code | Binary |
| Multi-turn | Mechanical gear train |
| Supply | 10–30 VDC |
| Protection | IP66/IP67 shaft, IP65 housing |
| Flange | 58 mm clamping flange |
| Shaft | 10 mm solid |
| Shaft length | 20 mm |
| Connection | Radial, M23 male, 26-pin |
| Speed | 3000 rpm |