We have developed a custom solution for model OCD-PPA1G-0412-B120-CRW, built around a compact 58 mm blind hollow-shaft platform with a Ø12 mm shaft bore, parallel push-pull multiturn output, and a radial cable outlet for side-entry wiring. This configuration is intended for systems that still acquire position through direct bit-level inputs rather than SSI or fieldbus communication, while requiring multiturn absolute feedback in a shaft-mounted mechanical layout. The encoder provides 12-bit singleturn + 4-bit multiturn Gray-code output, making it suitable for compact control architectures that prefer direct parallel acquisition without added protocol complexity. Typical production lead time: 15 working days.
Technical Key Parameters
- Interface: Parallel (push-pull)
- Resolution: 12 bit singleturn + 4 bit multiturn
- Mounting: Ø58 mm blind hollow shaft
- Shaft type: Ø12 mm blind hollow shaft, 30 mm depth
- Supply voltage: 10–30 VDC
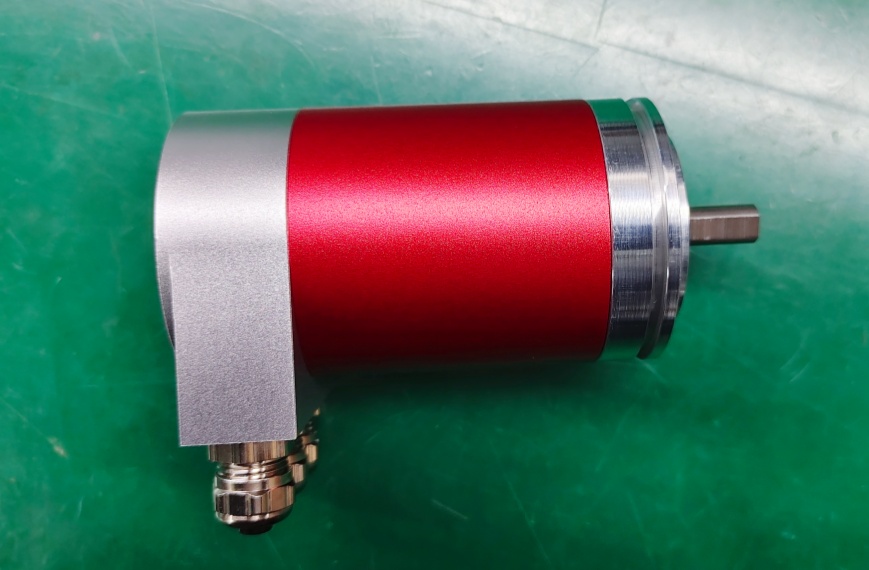
Custom Solution Photos


The configuration reflects a compact hollow-shaft encoder structure with radial cable outlet and direct parallel bit output for controller-side multiturn position acquisition.
Wiring and Installation Notes
This model uses a parallel push-pull output, so long-term stability depends more on wiring discipline across multiple conductors than on protocol settings. In practice, stable but incorrect position values are more often caused by bit-order mistakes, undefined control lines, or inconsistent ground reference than by encoder failure. The connection plan includes Bit 1 to Bit 16, plus Latch, DIR, Power Supply, and GND, so commissioning should verify signal assignment before controller-side scaling or logic is finalized. On this type of interface, incorrect direction behavior often looks like a counting or gearing problem, so the DIR function should be checked first whenever the position value changes in the wrong sense.
The encoder uses a 1 m radial PVC cable, and the specified minimum bending radius should be respected from the start. In compact cabinets, forced side-entry bends and poor strain relief are a more common source of long-term instability than the sensing element itself. Because this is a Ø12 mm blind hollow-shaft structure, installation quality also depends heavily on correct shaft seating and controlled clamping. Excessive radial stress, uneven support, or over-tight fastening can reduce bearing life and affect signal consistency. In practical shaft-mounted assemblies, cable routing and shaft alignment usually create problems earlier than the electronics do.
Application and Integration Notes
This configuration is typically used in compact rotary assemblies, shaft-mounted automation modules, and controller architectures that still rely on direct parallel absolute inputs instead of serial communication. Its main practical value lies in combining multiturn Gray-code output with blind hollow-shaft mounting, which avoids protocol handling while still giving the controller direct position information across multiple revolutions.
Compared with SSI or fieldbus encoders, this model reduces communication complexity but increases the importance of cable organization and I/O discipline. In practice, it is selected when the control hardware already supports parallel position acquisition and where a Ø12 mm blind hollow-shaft arrangement fits the mechanical layout better than a solid-shaft coupling. It is less suitable for long, noise-prone cable routes or for systems where minimizing conductor count matters more than keeping simple controller-side logic.
Custom Encoder Solution
- Compact 58 mm hollow-shaft structure for direct shaft-mounted installations
- 12 + 4 bit multiturn Gray-code output for direct controller-side position acquisition
- Ø12 mm blind hollow shaft for compact mechanical integration
- Radial cable outlet for side-entry routing in restricted mounting spaces
Lead Time and Custom Development
This model is configured based on confirmed hollow-shaft geometry, multiturn output requirements, and parallel integration logic. Typical production lead time: 15 working days.
Key Technical Data
| Item | Specification |
|---|---|
| Interface | Parallel, push-pull |
| Resolution | 12 bit + 4 bit |
| Supply voltage | 10–30 VDC |
| Mounting | Ø58 mm blind hollow shaft |
| Shaft type | Ø12 mm blind hollow shaft, 30 mm depth |
| Connection | Radial cable, 1 m PVC |
| Max speed | 12000 rpm |
| Protection | IP65 |
Technical Summary
The engineering value of OCD-PPA1G-0412-B120-CRW lies in its combination of a compact 58 mm hollow-shaft structure, multiturn parallel absolute output, and a direct parallel push-pull interface on a simple electrical architecture. It is best suited for shaft-mounted systems where direct controller-side position acquisition is required across multiple revolutions, but serial communication would add unnecessary integration overhead. In practical applications, the main success factors are correct bit assignment, stable direction logic, controlled side-entry cable routing, and careful hollow-shaft installation.