We developed a custom solution for model OCD-PPA1G-0710-C10S-CRW. Selected when multi-turn absolute feedback is required through a parallel push-pull interface, using a 58 mm clamping flange and 10 mm solid shaft, without moving to a fieldbus architecture. Typical production lead time: 15 working days. The referenced configuration is an optical version with 10-bit single-turn resolution, 7-bit multi-turn resolution, Gray code, a mechanical gear train without battery, 10–30 VDC supply, and a 1 m radial PVC cable.
Key Specifications
- Interface: parallel push-pull
- Resolution: 10-bit single-turn + 7-bit multi-turn
- Code: Gray
- Multi-turn: mechanical gear train, no battery
- Supply: 10–30 VDC
- Protection: IP66/IP67
- Structure: 58 mm clamping flange, 10 mm solid shaft, 20 mm shaft length
- Cable: 1 m radial PVC
- Speed: up to 3000 rpm
Decision Snapshot
- Best for: parallel absolute retrofit systems needing moderate multi-turn resolution with cable output
- Key fit: 10 mm solid shaft
- Avoid if: the application requires bus communication or only incremental feedback; the published parallel interface and 17-bit direct signal structure make this a hardware-mapped absolute encoder, not a networked device.
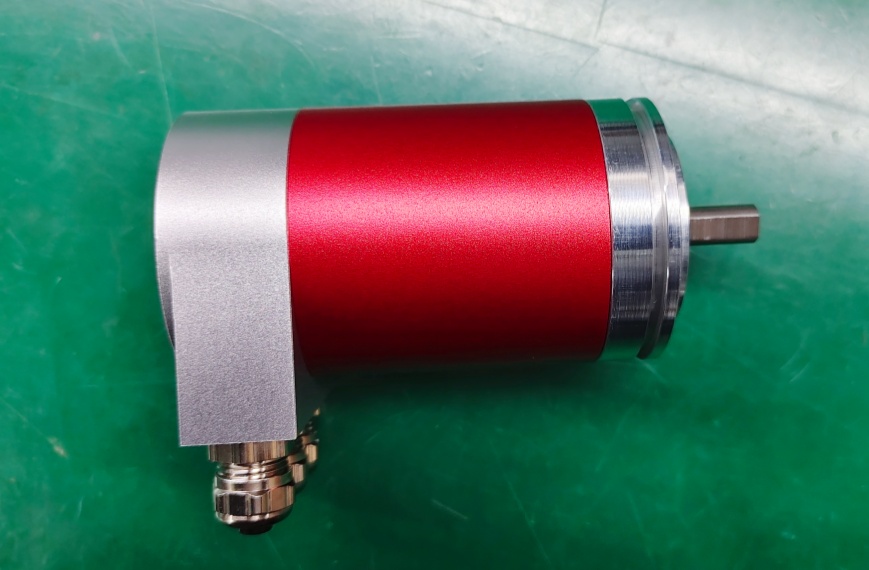
Custom Solution Photos


Encoder structure reference: 58 mm clamping flange, 10 mm solid shaft, 1 m radial cable outlet.
Signal & Output Architecture
The connection plan lists Bit 1 through Bit 17 plus Latch, DIR, Power Supply, and GND. That means the system reads position directly as parallel absolute data rather than as a bus telegram.
Primary integration value: straightforward direct input to the controller.
Primary limitation: cable-based parallel systems depend heavily on clean wiring discipline and correct mapping of all signal lines. In practice, unstable readings are more likely to come from wiring or EMC than from the sensing core itself. The product page’s EMC data and direct line mapping support that engineering judgment.
Mechanical & Installation Focus
This version uses a 10 mm shaft but only 3000 rpm maximum speed, so its real selection value is not high-speed operation. The more important fit point is stable shaft coupling with a standard clamping flange and industrial-grade environmental sealing. The page also lists axial and radial load limits and minimum bearing-life ranges under load, which means coupling accuracy still matters for long-term stability.
Wiring & Installation
The 1 m radial cable with AWG26 conductors and defined bend radius makes routing predictable, but the primary commissioning risk remains signal mapping. Check order should be: bit sequence → Latch timing → DIR logic → power/GND reference. That is the practical startup order for a direct parallel encoder with 17 output bits.
Integration & Compatibility
- Designed for parallel absolute encoder systems
- Matches 58 mm clamping flange installations with 10 mm solid shaft
- Suitable for multi-turn position feedback without battery replacement
- Not suitable for fieldbus-based control structures or simple incremental feedback use cases.
Lead Time
Typical production lead time: 15 working days. Custom adaptation can be developed around shaft fit, cable routing, signal assignment, and installation requirements.
Key Technical Data
| Item | Data |
|---|---|
| Model | OCD-PPA1G-0710-C10S-CRW |
| Interface | Parallel push-pull |
| Type | Absolute multi-turn |
| Sensing | Optical |
| Resolution | 10 bit + 7 bit |
| Code | Gray |
| Multi-turn | Mechanical gear train |
| Supply | 10–30 VDC |
| Protection | IP66/IP67 |
| Flange | 58 mm clamping flange |
| Shaft | 10 mm solid |
| Shaft length | 20 mm |
| Cable | 1 m radial |
| Speed | 3000 rpm |