

EncoderWorks can configure FGHJ40K-1024G-90G/20P as a custom compatible replacement solution when the installed system requires 1024 PPR standard A/B feedback, J isolated-bearing construction, K single terminal-box wiring, /20P hollow-shaft mounting, inverted signal pairs, torque bracket freedom, adapter-shaft alignment, and shield grounding to remain unchanged. The main failure boundary is a hollow-shaft drive that receives stable pulses but develops speed error, direction mismatch, pulse jitter, terminal-box wiring faults, or bearing-current damage because the pulse count, isolation path, bore fit, or EMC reference has changed. Typical production lead time: 15 working days.
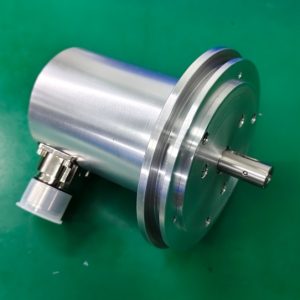
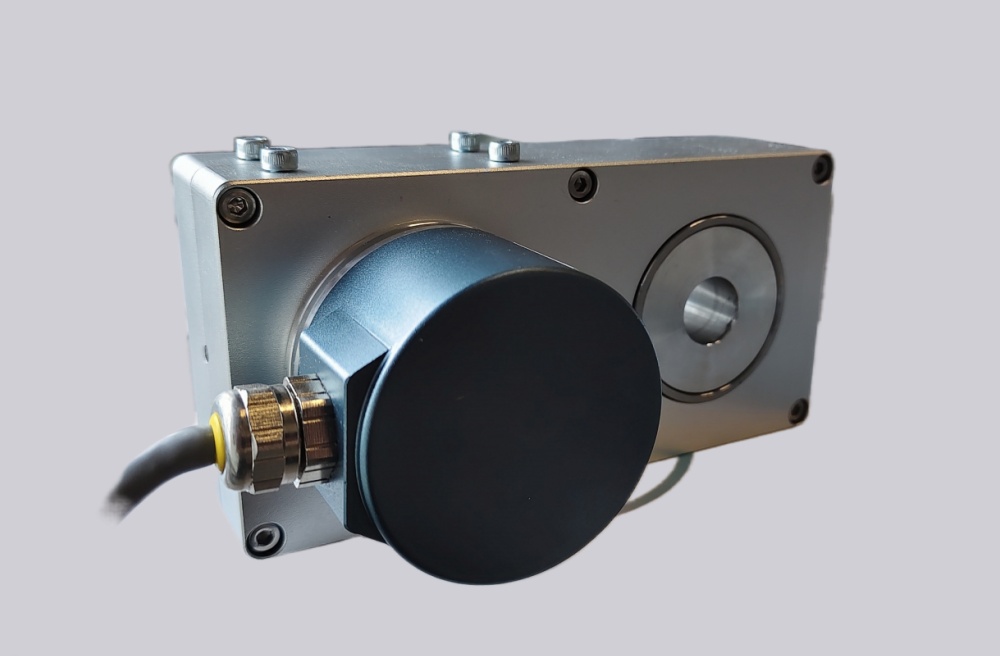
This model belongs to the FGHJ 40 incremental hollow-shaft encoder platform. The 1024 PPR value is a standard pulse-rate configuration, and the model code does not include NG, so the replacement should be handled as A/B feedback without an N reference pulse. The engineering focus is not only the encoder output level, but also the isolated bearing boundary, single terminal-box mapping, hollow-shaft fit, torque bracket movement, and 200 kHz counter margin.
System Limits
The first limit is 1024 PPR A/B scaling. If the controller is configured for 1000, 1200, 2048, or another pulse value, the encoder may output clean square waves while speed, travel, and position values become wrong. Edge-counting mode, gear ratio, speed conversion, and direction logic should be checked before startup.
The second limit is no-marker feedback logic. Because this model code does not include NG, the replacement should not add an N reference pulse unless the machine documentation specifically requires it. A control system expecting only A, /A, B, and /B may produce wiring faults, unused-channel alarms, or incorrect homing behavior if an additional reference signal is connected without approval.
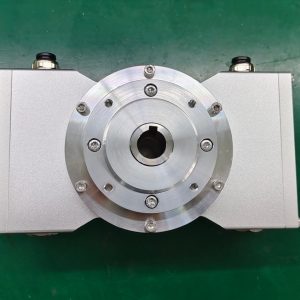
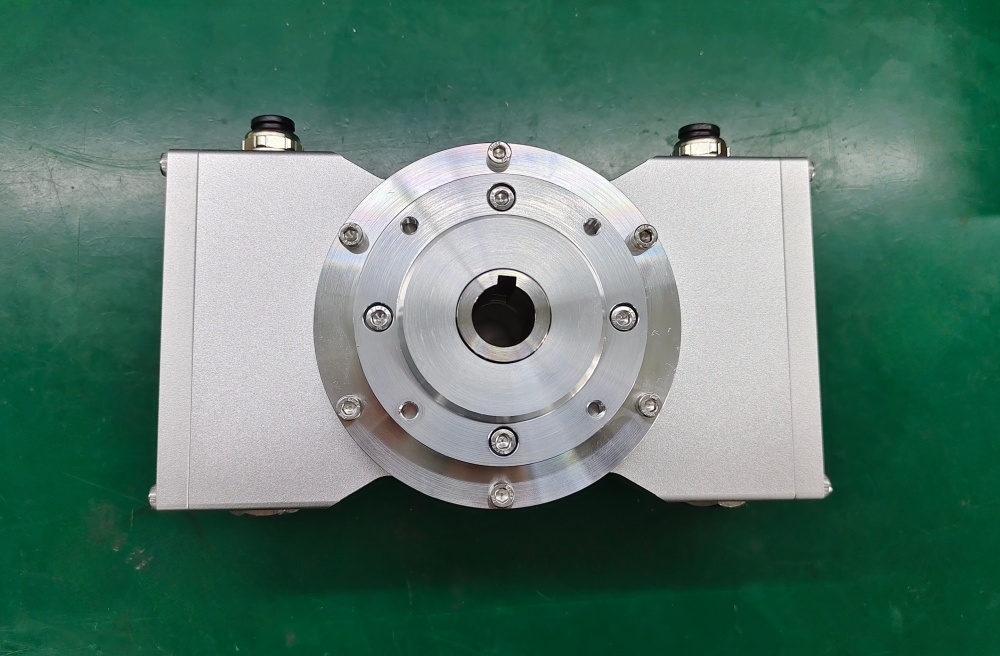
The third limit is hollow-shaft mechanics and bearing isolation. The /20P interface must fit the prepared shaft without forcing, and the torque bracket must remain free at the link heads. Adapter-shaft run-out, axial preload, radial load, shaft shock, torque-arm binding, or loss of the isolated-bearing boundary can shorten bearing life and appear as pulse jitter or unstable speed feedback.
Wiring & Installation
Before replacement, document the terminal-box wiring for supply voltage, GND, shield, A/B signal sequence, inverted outputs, and any diagnostic output used by the machine. Confirm that the counter input is scaled for 1024 PPR and that the system expects the same 0°/90° phase sequence without an N reference channel.
During installation, clean the shaft, centering surface, bolting faces, and fastening threads. Align the adapter shaft carefully, avoid hammering the encoder, and do not pull the hollow-shaft unit into position by force. The torque bracket should support housing reaction torque without transmitting bending load into the bearings.
For EMC stability, route feedback wiring away from inverter, motor, brake, contactor, and power cables. Use shielded cable, maintain large-area shield contact, and connect the grounding strap to a nearby low-impedance bare-metal point. Cable glands and blanking plugs must be tightened correctly, and cable strain must not pull sideways on the terminal-box entry. After commissioning, verify pulse count, direction, A/B phase, terminal-box sealing, shielding continuity, isolation requirement, and stable operation through the required speed range.
Custom Compatible Solution
EncoderWorks can configure the replacement around the installed isolated hollow-shaft and single terminal-box interface:
- Match 1024 PPR square-wave incremental output with 0°/90° A/B channel behavior and inverted signal pairs
- Preserve J isolated-bearing construction, K single terminal-box structure, supply range, output level, and no-marker feedback logic
- Adapt the FGHJ 40 /20P hollow-shaft interface, adapter-shaft fit, torque bracket position, sealing boundary, and cable-gland orientation
- Review 200 kHz counter margin, shielded wiring, terminal-box mapping, grounding strap, isolation requirement, bearing load, and A/B direction stability
Key Data
| Item | Data |
|---|---|
| Model | FGHJ40K-1024G-90G/20P |
| Encoder type | Incremental hollow-shaft encoder |
| Series | FGHJ 40 |
| Bearing construction | Isolated bearings |
| Connection structure | K single terminal box |
| Pulses per revolution | 1024 PPR |
| Pulse-rate class | Standard pulse rate |
| Signal output | Square wave, 0° and 90° channels |
| Inverted signals | Yes, G output configuration |
| Reference pulse | Not included in model code |
| Hollow-shaft interface | /20P |
| Supply voltage | 12–30 VDC |
| Output type | Current-limited, short-circuit-proof push-pull line driver |
| Maximum frequency | 200 kHz, higher on request |
| Protection class | IP65 standard, IP66 versions depending on sealing |
| Mechanical checks | /20P shaft fit, adapter-shaft run-out, torque bracket freedom, bearing load, isolation boundary |
| Key replacement checks | 1024 PPR scaling, terminal-box A/B mapping, isolated bearings, no-marker logic, shield grounding |