We developed a custom solution for the POG 9G DN 1024 I encoder, intended for heavy-duty drive systems where 1024 PPR HTL incremental feedback must stay stable under vibration, high temperature, and long cable routing. This model should be treated as a single incremental feedback configuration with DN signal output, not as a confirmed dual-system redundant version. Typical production lead time: 15 working days.
This configuration is built around a simple but demanding signal chain:
- DN = K1, K2, K0 output signals
- 1024 = 1024 pulses per revolution
- I = 9–30 VDC HTL output with inverted signals
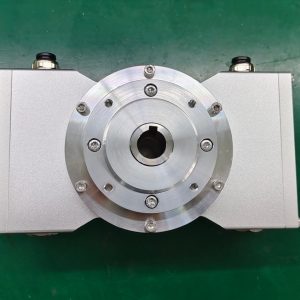
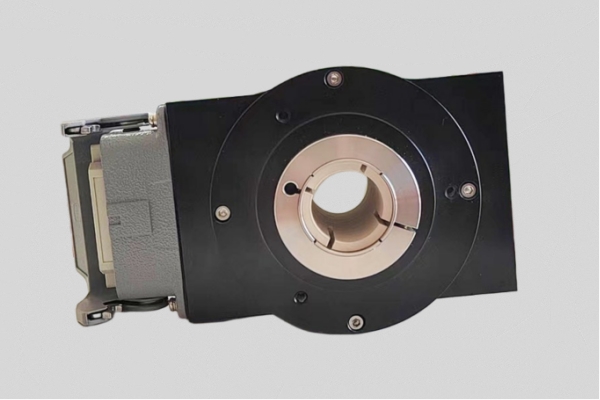
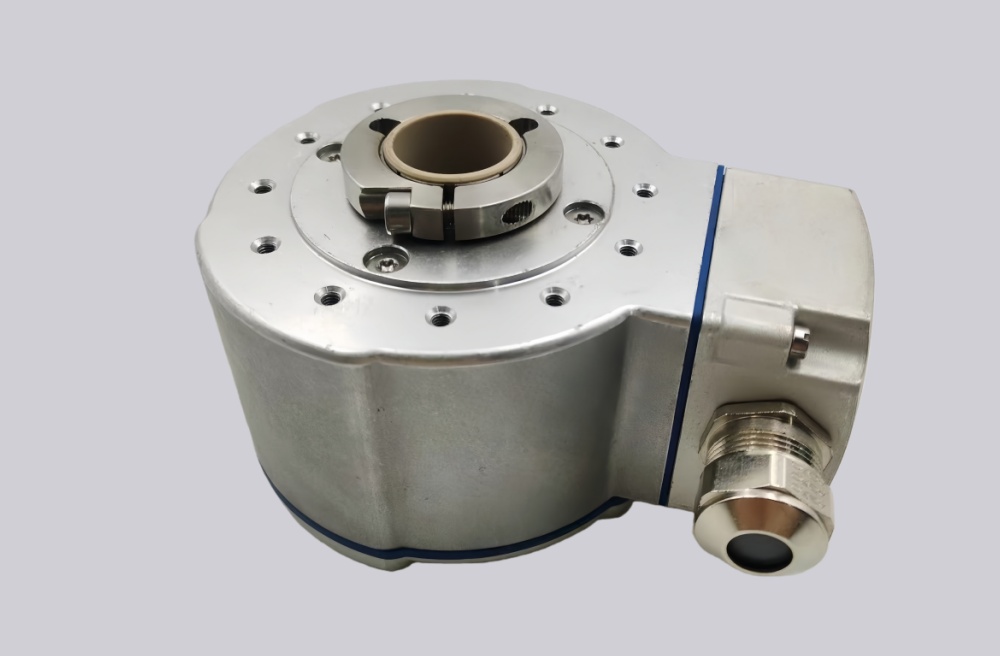
- POG 9G = heavy-duty encoder body with EURO flange B10 and Ø11 mm shaft
The weak point is not the optical sensing first. In real installations, failure normally starts at terminal grounding, cable shielding, counter input stability, or coupling stress.


Where the System Usually Fails
At 1024 PPR, the pulse frequency is already high enough that the controller input and cable quality matter. The encoder allows output frequency up to 120 kHz, but that does not mean the whole system can safely count at that level. If the PLC counter, grounding, or cable shielding is weak, pulse loss appears before the encoder shows any visible fault.
The most common failure points are:
- Poor shielding → distorted HTL edges
- Unstable terminal grounding → false counts
- Rigid coupling → torsional shock into the shaft
- High temperature → cable and terminal stability drop
- Wrong K1/K2 interpretation → reversed direction counting
The K0 zero pulse should also be treated carefully. Under shaft vibration or poor grounding, the reference pulse is often where intermittent counting errors first become visible.
Mechanical and Signal Boundary
This encoder body is made for heavy-duty operation, but the shaft system still decides service life. The datasheet gives ≤350 N radial load, ≤250 N axial load, ≤12000 rpm mechanical speed, 10 g vibration, and 300 g shock resistance. These numbers are strong, but they do not cancel poor coupling alignment. In heavy drives, torsional vibration usually becomes a signal problem before it becomes a bearing failure.
For HTL output, cable routing is the second boundary. Keep encoder wiring away from inverter output cables and motor power lines. Once the shield path is interrupted at the terminal box, edge symmetry becomes unstable and the counter starts losing trust in the signal.
Installation Notes
- Use flexible coupling suitable for Ø11 mm shaft
- Keep terminal-box grounding continuous
- Separate encoder cable from motor and inverter wiring
- Confirm PLC counter capacity against actual RPM and 1024 PPR
- Check K1/K2 phase direction before commissioning
- Treat IP56 as industrial protection, not washdown protection
Key Data
- Model: POG 9G DN 1024 I
- Type: Heavy-duty incremental encoder
- Resolution: 1024 PPR
- Output: HTL with inverted signals
- Signals: K1, K2, K0 + inverted
- Supply voltage: 9–30 VDC
- Output frequency: ≤120 kHz
- Shaft: Ø11 mm stainless steel
- Flange: EURO flange B10
- Operating speed: ≤12000 rpm
- Protection: IP56
- Operating temperature: -30 °C to +100 °C
- Shaft load: ≤250 N axial / ≤350 N radial
- Vibration: 10 g
- Shock: 300 g
- Connection: Terminal box
- Weight: Approx. 1.7 kg