When replacing 20-2951-200, EncoderWorks can configure a custom compatible replacement solution around the 200 PPR incremental scaling, 10–30 VDC push-pull output, M16 5-pin A/B/0 signal mapping, Ø6 mm shaft alignment, rectangular housing fit, and IP40 installation boundary. The main failure boundary is a compact rotary feedback system that appears electrically active but causes wrong speed scaling, direction reversal, reference loss, connector mismatch, coupling load stress, or intermittent counting because the PPR value, output switching type, pin assignment, shaft load, or housing installation boundary has changed. Typical production lead time: 15 working days.
This model belongs to the 20-295 rectangular incremental rotary encoder platform. The output switching code “1” identifies the 10–30 VDC push-pull version, while 200 is a listed pulse count for this series. Compared with 1000, 2000, or 2500 PPR variants, this lower-count version places less demand on edge frequency but still requires exact controller scaling, A/B phase recognition, 0 reference-signal handling, and stable connector wiring.

System Limits
The first limit is 200 PPR scaling, push-pull output behavior, and A/B/0 signal use. The controller input, edge-counting mode, direction logic, 160 kHz frequency margin, and 0 reference-signal requirement must match the installed configuration. If 200 PPR is replaced by 180, 250, 300, or another count, or if the 0 signal is ignored or wired to the wrong input, the machine may show incorrect speed, failed reference detection, unstable counting, or reversed travel.
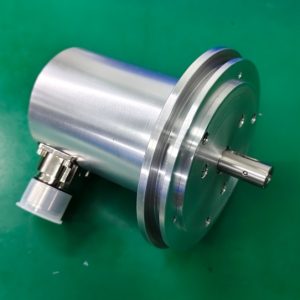
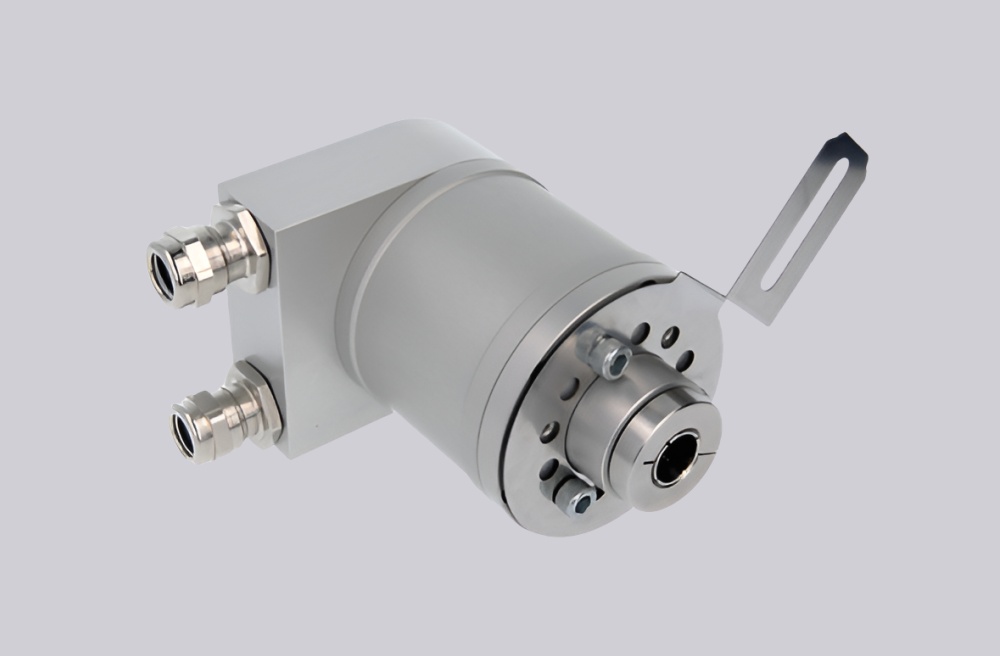
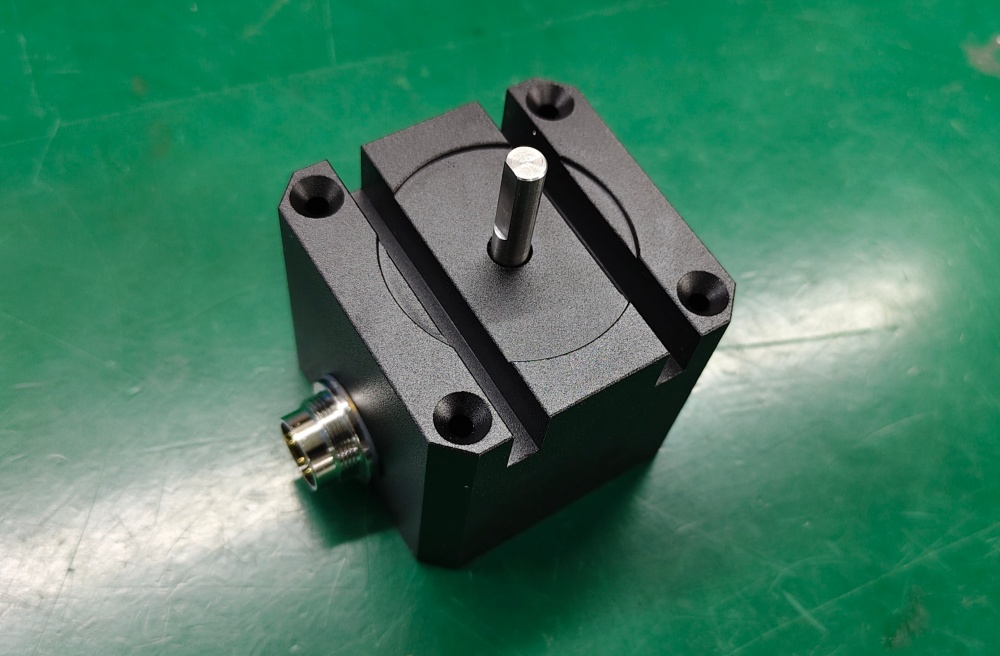
The second limit is M16 pin mapping and rectangular solid-shaft installation. The 5-pin connector must preserve GND, +Ub, A, B, and 0 assignment, while the Ø6 mm shaft, square mounting face, radial connector clearance, 3000 rpm speed limit, 10 N axial/radial shaft-load boundary, and IP40 protection class must remain compatible with the machine. Wrong pinout, side load on the connector, excessive coupling load, poor centering, or use beyond the IP40 boundary can cause signal dropouts, bearing stress, or early mechanical failure.
Wiring & Installation
Before replacement, verify the installed pulse count, output switching code, connector orientation, controller input type, and whether the machine uses the 0 reference signal. A 10–30 VDC push-pull version should not be interchanged with a 5 V RS422 version unless the controller input, wiring method, and signal expectations are changed at the same time.
During installation, align the Ø6 mm shaft coupling without forcing the shaft, keep axial and radial loads within the original boundary, and check that the rectangular housing is fastened without twisting the shaft. Route the cable so that the radial M16 connector is not pulled sideways, and keep feedback wiring away from inverter, motor, brake, contactor, and power cables.
Custom Compatible Solution
EncoderWorks can configure the replacement around the installed rectangular incremental encoder interface:
- Match 200 PPR low-count scaling, 10–30 VDC push-pull output, and controller input level
- Preserve A/B phase behavior, 0 reference-signal use, and M16 5-pin connector mapping
- Adapt the rectangular housing fit, square mounting face, radial connector orientation, and Ø6 mm shaft interface
- Review 160 kHz count margin, coupling load, IP40 installation boundary, cable routing, and reference-pulse repeatability before shipment
Key Data
| Item | Data |
|---|---|
| Model | 20-2951-200 |
| Encoder type | Incremental rotary encoder |
| Housing style | Rectangular / cuboid housing |
| Output switching | Code 1, 10–30 VDC push-pull |
| Pulse count | 200 PPR |
| Pulse-count class | Listed lower-count pulse count |
| Signal channels | A, B, and 0 reference signal |
| Output frequency | Max. 160 kHz |
| Connector | 9414 M16, 5-pin |
| Pin mapping | GND 1, +Ub 2, A 3, B 4, 0 5 |
| Shaft | Ø6 mm solid shaft |
| Rotational speed | Max. 3000 rpm |
| Shaft load | 10 N axial, 10 N radial |
| Protection class | IP40 |
| Key replacement checks | 200 PPR scaling, push-pull output, A/B/0 mapping, M16 pinout, Ø6 shaft alignment, 160 kHz margin, IP40 boundary |