We designed a custom solution for the PMG10-SHD.12UG.36000.G encoder, intended for applications where absolute position feedback must remain stable in abrasive industrial environments while using a Gray-coded SSI architecture. This configuration is built on the PMG10 solid shaft platform with Ø11 mm shaft, EURO flange B10, and protection class D, making it suitable for installations where contamination resistance, long service life, and deterministic serial position transmission matter more than simple incremental pulse output. It is not a general-purpose encoder for basic motion indication. It is a system-oriented absolute feedback solution where SSI timing, control-side integration, and environmental matching determine whether the signal remains usable. Typical production lead time: 15 working days under confirmed configuration.
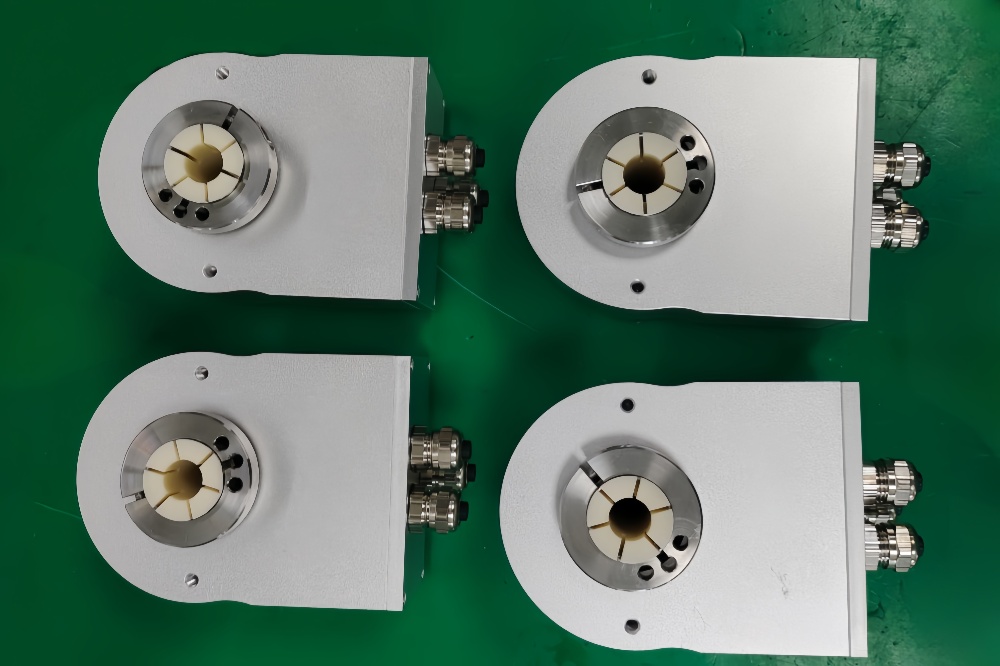
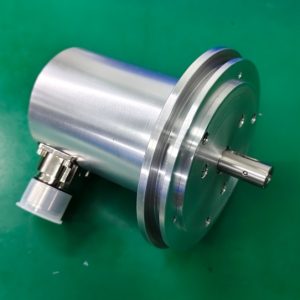
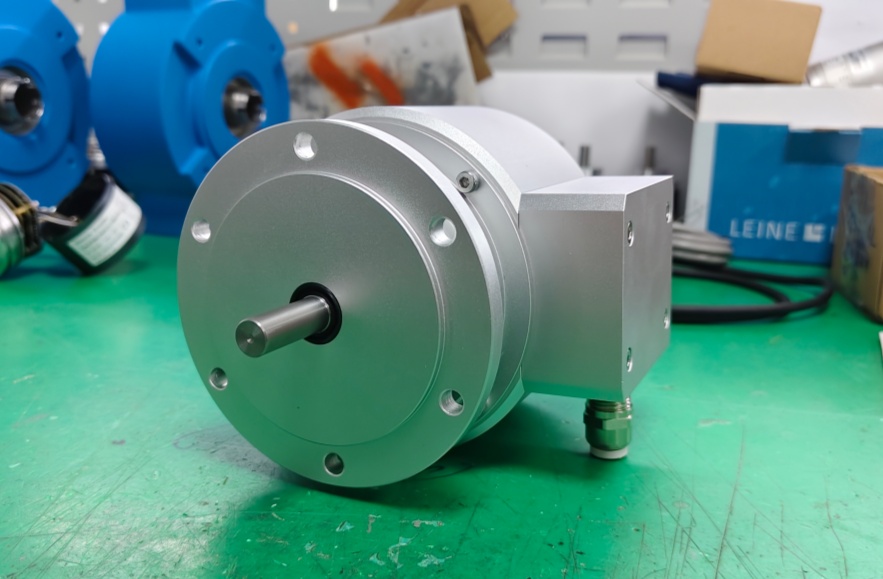
Custom Solution Photos

Stable feedback in this configuration depends on shaft alignment, SSI wiring quality, connector or terminal integrity, and correct control-side clock handling.
System Limits
- SSI clock outside 100 kHz to 2 MHz → position transmission becomes invalid
- Control-side startup handling below the required initialization time → data may be read too early
- Interface mismatch, not shaft structure, is the first practical system limit
This model is based on a Gray-coded SSI output, with 13-bit singleturn and 16-bit multiturn structure derived from the ordering code, so the main engineering boundary is not mechanical resolution generation but correct serial data acquisition. The PMG10 platform itself supports multiturn sensing with MicroGen energy harvesting, meaning no battery and no gear train are required for multiturn retention. In real systems, failure is more likely to come from incorrect SSI timing, poor shielding, or wrong logic integration than from the encoder body itself.
Installation and Wiring Constraints
- Use correct SSI differential pairs for clock and data
- Respect the required initializing time ≤500 ms after power on
- Integrate DIR and PRESET only when the controller logic is clearly defined
- Keep terminal or cable gland wiring clean and stable in dusty environments
- If additional outputs are not used, do not design the system around optional channels that are absent in this code
Integration logic:
- C+ / C− = SSI clock
- D+ / D− = SSI data
- DIR = direction logic input
- PRE = preset input
- nE+ / nE− = system OK or error output
Incorrect clocking, wrong preset handling, or poor differential wiring will invalidate position data before any mechanical limit is reached.
Replacement and Interface Mapping
- Suitable for systems requiring SSI Gray-coded absolute position feedback
- Applicable where dusty or abrasive environments demand reinforced environmental resistance
- Not suitable where the controller cannot support proper SSI clocking and startup timing
- This version is focused on absolute serial feedback, not on optional incremental or speed-switch functions
Key Data
- Model: PMG10-SHD.12UG.36000.G
- Type: Absolute encoder, SSI
- Shaft: Ø11 mm solid shaft
- Mounting: EURO flange B10
- Protection class: D, optimized for dusty abrasive environment
- Supply voltage: 4.75 to 30 VDC
- Interface: SSI
- Code: Gray
- Singleturn resolution: 13 bit
- Multiturn resolution: 16 bit
- Initializing time: ≤500 ms
- Max operating speed: ≤12000 rpm
- Protection: IP66 / IP67
- Operating temperature: -40 to +95 °C
- Connection: Terminal box radial, cable gland M20
PMG10-SHD.12UG.32000.G Incremental Encoder
PMG10-SHD.12UG.20000.A Incremental Encoder Solution