We engineered a custom solution for the PMG10-SHD.12UG.20000.A encoder, intended for applications where absolute position feedback must be fully integrated into control systems using SSI with predictable logic behavior and stable parameter handling. This configuration is based on the PMG10 solid shaft platform with Ø11 mm shaft, EURO flange B10, and an extended operating temperature option, making it suitable for control-critical environments where system response, preset logic, and direction handling are more important than maximum resolution. It is not a standalone position sensor. It is a control-integrated absolute feedback device where SSI timing, input signals, and controller synchronization define system performance. Typical production lead time: 15 working days under confirmed configuration.
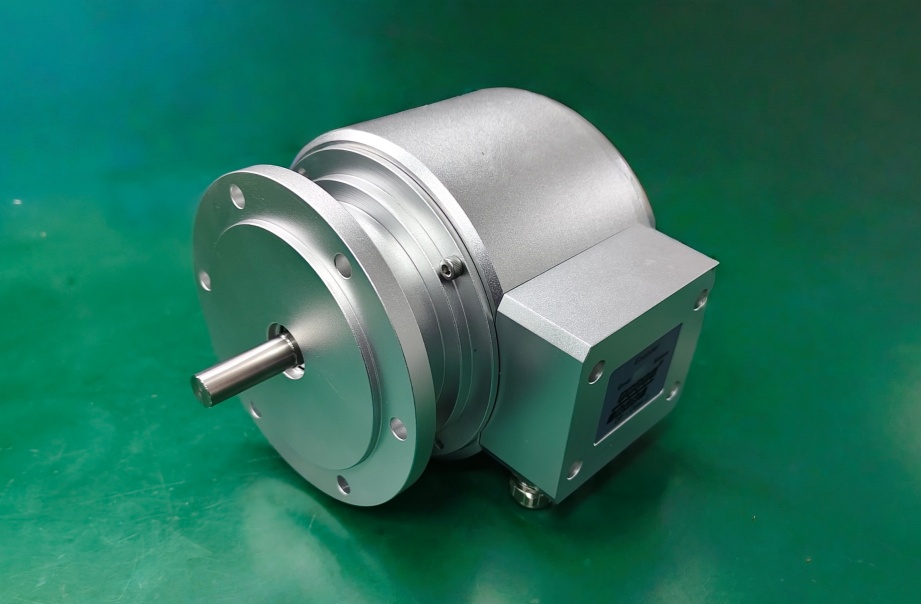
Custom Solution Photos
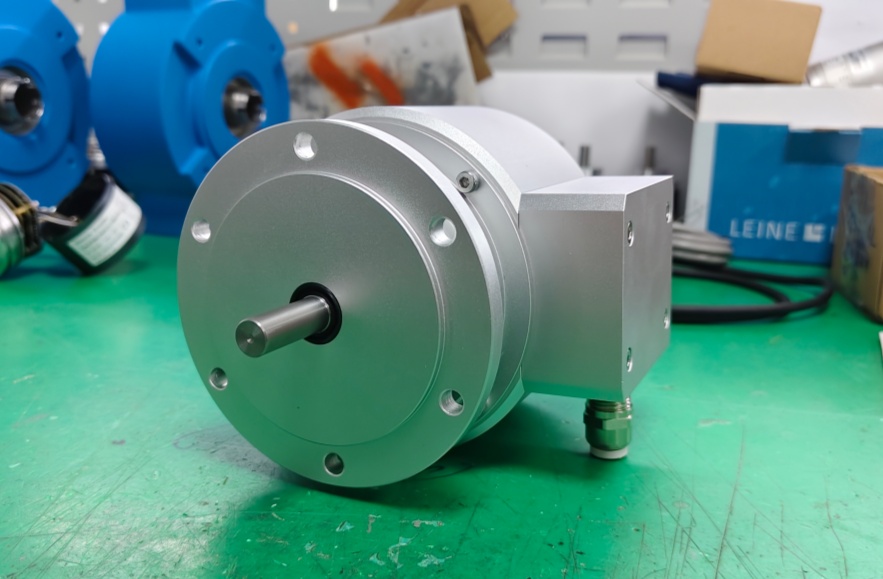

Reliable operation depends on shaft alignment, terminal integrity, and correct controller-side signal integration.
System Limits
- Incorrect SSI clocking or sampling → position data becomes unusable
- Improper PRESET or DIR logic → position reference error
- Controller-side mismatch → system-level position deviation
This model uses a Gray-coded SSI interface with a 13-bit singleturn and 10-bit multiturn structure, but system limits are not defined by resolution. The PMG10 platform uses MicroGen energy harvesting, eliminating battery dependence, so system failure is more likely to come from incorrect control integration than from internal sensing.
Installation and Wiring Constraints
- Use differential pairs for SSI clock (C+/C−) and data (D+/D−)
- Respect initializing time ≤500 ms before reading position
- Integrate DIR (direction) and PRESET (position reset) only with defined logic
- Keep wiring isolated from high-noise power circuits
- Ensure controller sampling matches SSI timing
Control logic:
- SSI is clock-driven by controller, not encoder-driven
- DIR input changes logical counting direction, not mechanical rotation
- PRESET resets position reference, must be synchronized with system state
- nE output indicates system health or fault condition
Failure boundary:
- Wrong preset timing → position jump
- Wrong direction logic → reversed position tracking
- Clock mismatch → unstable data stream
System integration must be correct before position data becomes meaningful.
Replacement and Interface Mapping
- Suitable for systems requiring SSI-based control integration with absolute positioning
- Applicable where control logic and system synchronization are critical
- Not suitable where controller cannot manage SSI timing and input signals
- Designed for absolute positioning systems, not simple incremental feedback
Key Data
- Model: PMG10-SHD.12UG.20000.A
- Type: Absolute encoder, SSI
- Shaft: Ø11 mm solid shaft
- Mounting: EURO flange B10
- Supply voltage: 4.75 to 30 VDC
- Interface: SSI
- Code: Gray
- Singleturn resolution: 13 bit
- Multiturn resolution: 10 bit
- Clock frequency: 100 kHz to 2 MHz
- Initializing time: ≤500 ms
- Max speed: ≤12000 rpm
- Protection: IP66 / IP67
- Operating temperature: -40 to +85 °C
- Connection: Terminal box, M20 cable gland
PMG10-SHD.12UG.36000.G Incremental Encoder Solution
PMG10-SHD.12UG.32000.G Industrial Encoder