For 8.H120.4B5K.4096, EncoderWorks can provide a custom compatible replacement focused on 10–30 V push-pull receiver matching, 4096 PPR scaling, Ø16 mm blind hollow-shaft fit, and terminal-box wiring. This model should not be treated like the 2048 PPR version. The same shaft and terminal-box structure may look familiar, but the higher pulse count makes input frequency margin, channel mapping, shielding, and controller filter settings more critical.
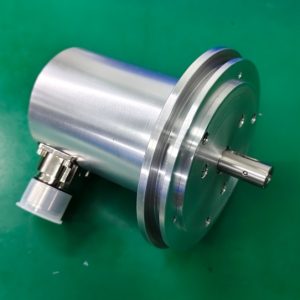
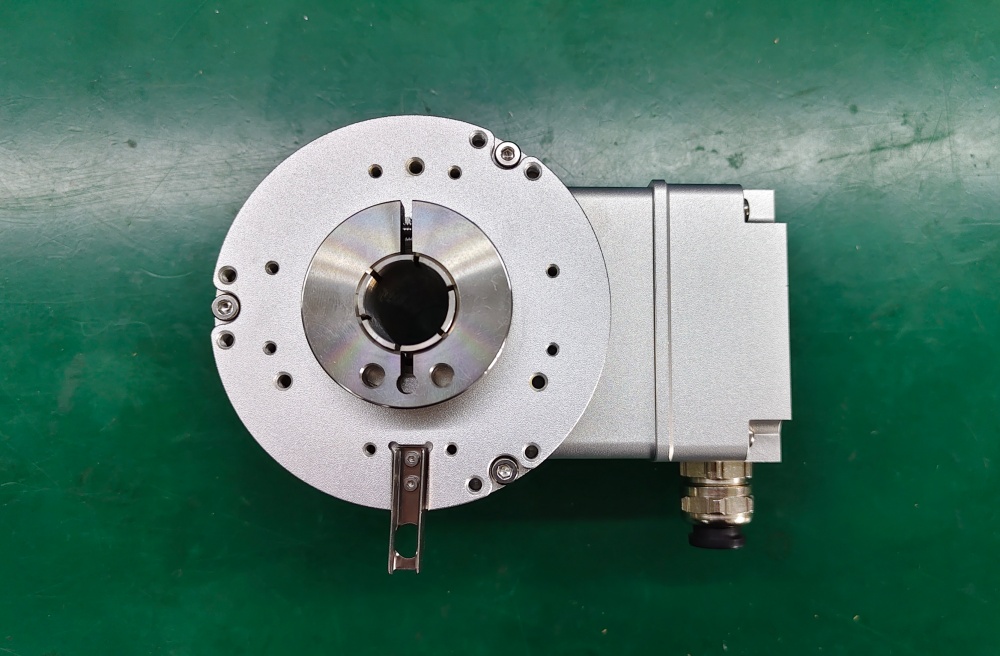
The 8.H120.4B5K.4096 is a heavy-duty optical incremental hollow-shaft encoder configuration with 4096 PPR, push-pull output with inverted signals, 10–30 VDC supply, Ø16 mm blind hollow shaft with center fastening, 150 mm torque arm, and a rotatable terminal box with plug-in spring terminals. The controller must keep the same quadrature mode, reference-pulse logic, and 4096 PPR scaling.
The first failure boundary is high-pulse signal integrity. A, B, 0 and inverted A/B/0 must be wired by function. If terminal assignment, receiver threshold, input filtering, shield grounding, or reference-pulse handling is wrong, the controller may count correctly at low speed but lose edges during real operation.
This replacement fails when A/B/0 signals are present, but the controller loses counts or reads the wrong motion value because push-pull output behavior, 4096 PPR scaling, terminal wiring, inverted-channel mapping, or reference-pulse handling does not match the original encoder.
The second boundary is blind hollow-shaft mechanics. The Ø16 mm blind bore, center-fastening screw, insertion depth, 150 mm torque arm, radial load, axial load, IP67 sealing, and terminal-box orientation must be checked together. The torque arm should stop housing rotation without forcing radial or angular preload into the bearing system.
The replacement decision should first confirm 4096 PPR scaling, 10–30 V push-pull receiver compatibility, A/B/0 plus inverted channel mapping, 300 kHz frequency margin, terminal-box assignment, Ø16 mm blind hollow-shaft fit, center-fastening requirement, insertion depth, 150 mm torque-arm geometry, IP67 sealing, shield grounding, cable routing, and shaft-load limits. EncoderWorks treats 8.H120.4B5K.4096 as an industrial encoder custom compatible solution where high-pulse signal margin and terminal-box accuracy decide field reliability.
Typical production lead time: 15 working days.
Key Data
| Item | Data |
|---|---|
| Model | 8.H120.4B5K.4096 |
| Encoder type | Heavy-duty incremental hollow-shaft encoder |
| Detection type | Optical |
| Pulse count | 4096 PPR |
| Output circuit | Push-pull with inverted signals |
| Signal output | A, B, 0 and inverted A, B, 0 |
| Supply voltage | 10–30 VDC |
| Max pulse frequency | 300 kHz |
| Shaft type | Blind hollow shaft |
| Shaft size | Ø16 mm |
| Mounting | 150 mm torque arm |
| Connection | Rotatable terminal box |
| Protection class | IP67 |
| Main engineering anchor | Push-pull output and terminal box |
| Main failure boundary | Wrong terminal mapping, receiver mismatch, edge loss, blind-shaft preload |