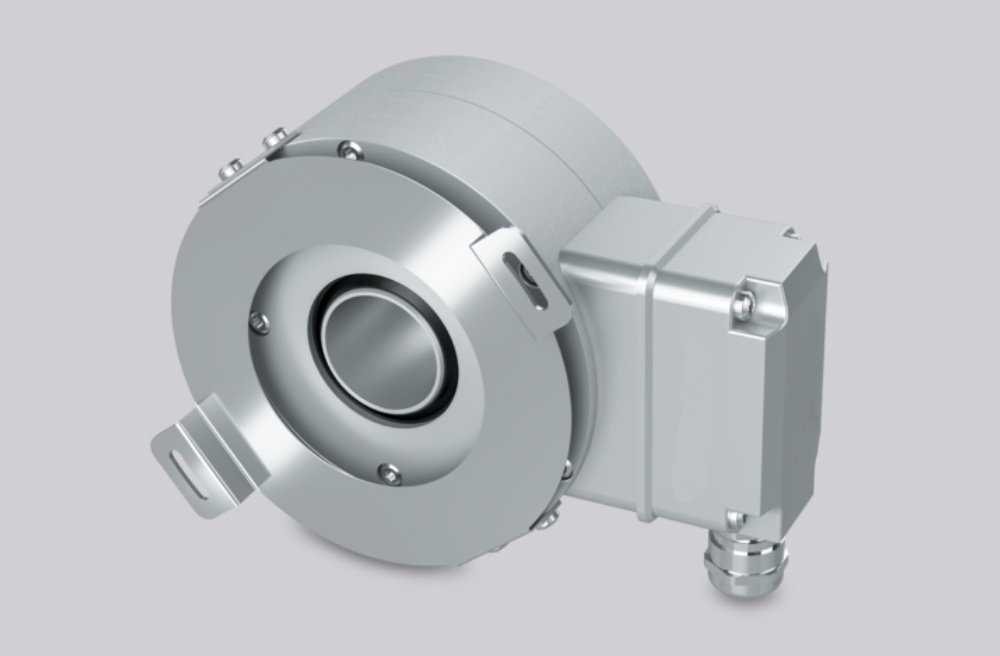
We developed a custom solution for the POG10 D 1024 I encoder, intended for heavy-duty drive systems where 1024 PPR HTL incremental feedback must stay stable under vibration, high temperature, terminal-box wiring, and EMC noise. This is a POG 10 D-output configuration, so it should be treated as K1 / K2 feedback only, not a DN version with K0 zero pulse.
Typical production lead time: 15 working days.
Model reading is direct:
- D = K1, K2 output signals
- 1024 = 1024 pulses per revolution
- I = 9–30 VDC, HTL output with inverted signals
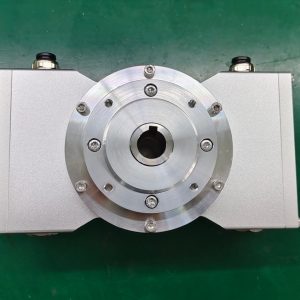
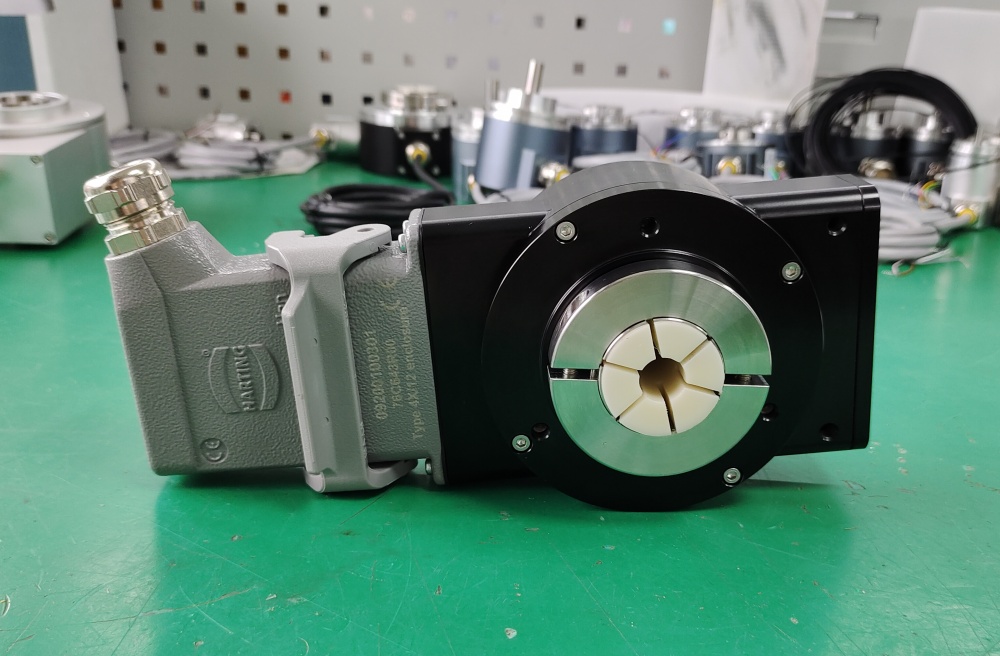
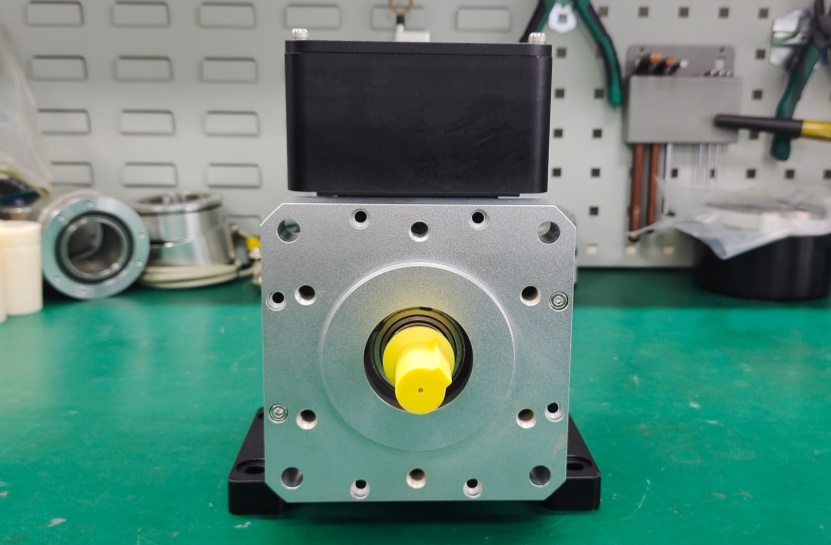
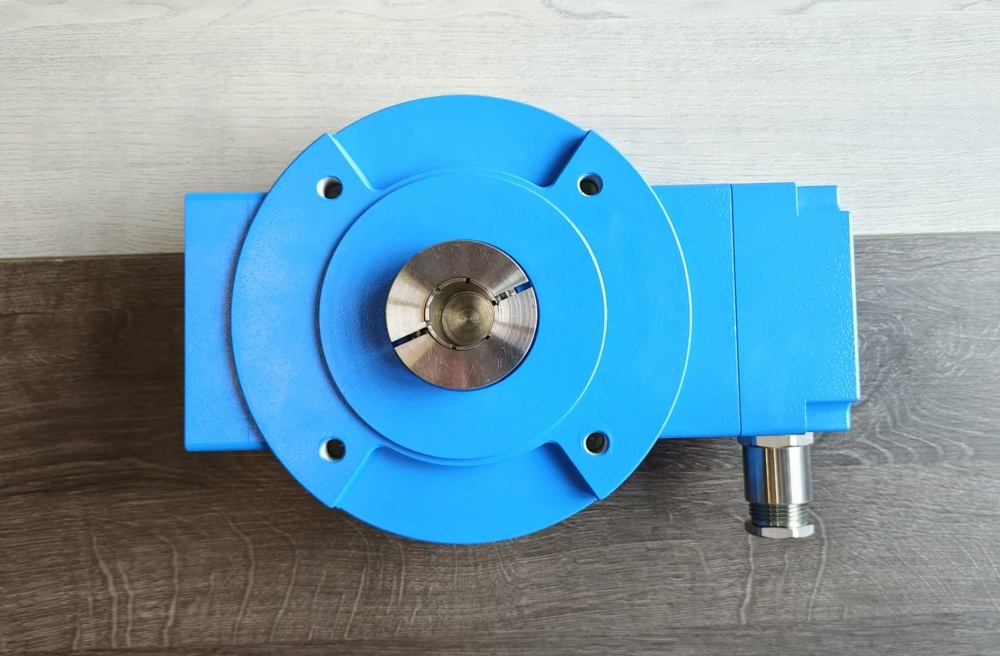
- POG10 = Ø11 mm shaft, EURO flange B10, terminal-box heavy-duty encoder body
The main weak point is not optical sensing. In real installations, instability normally starts at counter input margin, terminal grounding, cable shielding, K1/K2 phase quality, or coupling torsion.


Where the System Fails First
At 1024 PPR, the pulse rate is already high enough to expose weak PLC or drive counter inputs. The encoder allows output frequency ≤120 kHz, but the system only remains reliable if the counter, shielding, and grounding preserve clean HTL edges. Once the terminal-box shield path becomes unstable, the counter may still see voltage transitions, but the edge timing is no longer trustworthy.
Typical failure points:
- Counter input too slow → missed pulses
- Poor terminal grounding → false HTL edges
- Shield interruption → unstable speed feedback
- Wrong K1/K2 phase interpretation → reversed direction
- Rigid coupling → torsional shock into the Ø11 mm shaft
Because this is a D version, there is no K0 reference pulse in the output structure. Do not design it as an index-referencing encoder unless the system uses a separate home sensor or another reference method.
Mechanical Boundary
POG10 is built for heavier service than small incremental encoders: ≤300 N axial load, ≤450 N radial load, IP66 protection, 20 g vibration, and -40 °C to +100 °C operating temperature. These margins help, but they do not cancel poor alignment. In heavy drives, torsional vibration usually becomes a counting problem before it becomes visible bearing damage.
Installation Notes
- Keep the model format as POG10 D 1024 I
- Do not add K0 logic; D = K1 / K2 only
- Confirm counter frequency at real RPM
- Keep terminal-box grounding continuous
- Separate encoder cable from inverter and motor power wiring
- Verify K1 / K2 phase direction before startup
- Use a flexible coupling suitable for Ø11 mm shaft
- Do not write this as TTL, DN, or FSL unless the model explicitly shows it
Key Data
- Model: POG10 D 1024 I
- Type: Heavy-duty incremental encoder
- Resolution: 1024 PPR
- Output: HTL with inverted signals
- Signals: K1, K2 + inverted
- Supply voltage: 9–30 VDC
- Output frequency: ≤120 kHz
- Shaft: Ø11 mm stainless steel
- Flange: EURO flange B10
- Protection: IP66
- Operating temperature: -40 °C to +100 °C
- Optional temperature range: -50 °C to +100 °C
- Shaft load: ≤300 N axial / ≤450 N radial
- Vibration: 20 g, 10–2000 Hz
- Shock: 200 g, 6 ms
- Connection: Terminal box
- Weight: Approx. 1.9 kg