

EncoderWorks supports the FGH4K-500G-90G-NG/20P custom compatible replacement solution for heavy-duty incremental feedback where 500 PPR scaling, A/B 90° quadrature, NG reference-pulse behavior, terminal-box wiring, shield continuity, and 20 mm hollow-shaft fit must stay matched to the installed counter. The failure boundary is not a fieldbus address or an absolute position word, but wrong speed scaling, missed direction edges, reference-pulse mismatch, output-driver incompatibility, ground noise, hollow-shaft runout, and torque-reaction movement. Typical production lead time: 15 working days.
This model is used where the controller reads speed, direction, or machine position from A/B incremental channels and uses the NG reference pulse for indexing or homing. A compatible replacement must preserve the 500 pulses per revolution, 90° channel separation, reference-pulse location, inverted reference requirement, electrical output level, terminal assignment, shield path, 20P bore interface, and heavy-duty mounting boundary.
System Limits
The first system boundary is the 500 PPR counter scaling and signal interface. FGH4K-500G-90G-NG/20P must be checked against the controller’s edge evaluation mode, speed calculation, expected A/B direction, reference-pulse width, output-driver type, supply level, cable length, and inverted-signal requirement. If the replacement is supplied as 100 PPR, 1024 PPR, 1200 PPR, or another nearby resolution, the encoder may still generate clean pulses while the controller calculates the wrong speed, travel distance, or index position. Typical failures include wrong speed display, coarse-position offset, unstable homing, reversed direction logic, or repeatability loss after reference search.
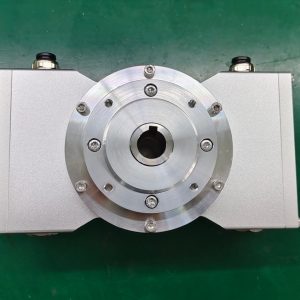
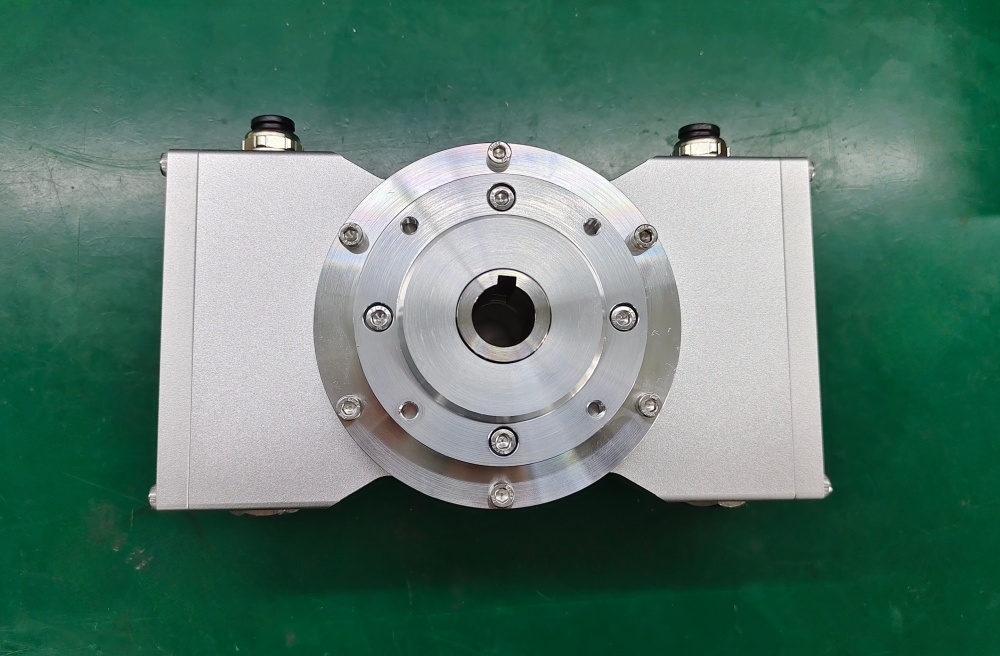
The second boundary is the 20 mm hollow shaft and EMC installation. Terminal-box wiring, 0 V reference, shield bonding, cable routing, and housing ground must be treated as part of the measurement circuit. A correct encoder can still fail if the cable shield is grounded through a high-impedance path, the signal cable is routed beside brake or inverter wiring, the terminal box loses PE continuity, or the 20 mm bore is clamped under eccentric load. Mechanical checks should include bore fit, shaft runout, axial movement, torque-reaction restraint, vibration, and bearing load.
Wiring & Installation
Before replacement, confirm the complete installed model code, 500 PPR requirement, A/B phase relationship, NG reference-pulse use, inverted reference requirement, output circuit, supply voltage, terminal-box layout, cable entry direction, shield termination method, and 20 mm hollow-shaft dimension. This model should not be inferred from high-resolution FGH4K variants because the controller scaling, edge rate, speed calculation, and reference detection margin are different.
During installation, verify A, B, reference, inverted reference if used, supply, 0 V, shield, and housing ground before powering the system. Keep the signal cable away from motor, brake, SCR, and VFD wiring, and avoid using the cable shield as a load-carrying ground conductor. The hollow shaft must sit concentrically on the machine shaft, and the torque-reaction element should stop encoder-body rotation without forcing the bearing system. Eccentric preload can become phase jitter, bearing wear, or poor reference-pulse repeatability.
Custom Compatible Solution
- Match 500 PPR incremental feedback, A/B 90° quadrature, NG reference-pulse behavior, and controller counter expectations
- Preserve output-driver compatibility, terminal-box wiring, supply reference, inverted-signal requirement, shield path, and grounding continuity
- Adapt the 20 mm hollow shaft, heavy-duty housing, bore fit, torque-reaction boundary, cable entry, and machine-side mounting geometry
- Review speed scaling, reference repeatability, counter margin, EMC exposure, shaft runout, vibration, and commissioning checks before shipment
Key Data
| Item | Data |
|---|---|
| Model | FGH4K-500G-90G-NG/20P |
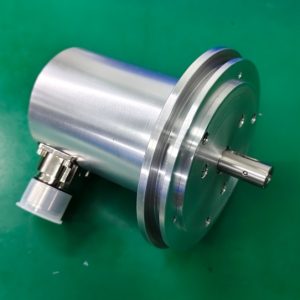
| Encoder type | Heavy-duty hollow-shaft incremental encoder |
| Feedback type | Incremental A/B with reference pulse |
| Pulse count | 500 PPR |
| Phase relationship | A/B, 90° quadrature |
| Reference pulse | NG reference pulse with inverted signal requirement |
| Shaft interface | 20 mm hollow shaft / 20P bore |
| Connection boundary | Terminal-box wiring requires confirmation against installed version |
| Output circuit | Requires confirmation against controller input |
| Supply voltage | Requires confirmation against installed version |
| Key system checks | Counter scaling, speed calculation, edge evaluation, A/B direction, reference pulse, inverted signal, shield grounding |
| Key mechanical checks | Bore fit, shaft runout, torque reaction, axial movement, vibration, bearing load |
| Replacement focus | 500 PPR scaling, NG reference repeatability, terminal-box grounding, 20 mm hollow-shaft stability |